AI手术机器人代替主刀医师?
知情郎·眼|专利情报新开了栏目—专利情报。专门分享高精尖领域的牛公司、牛专利、研发动向。本期讲的是医疗器械领域的大牛公司--Intuitive Surgical,Inc(直觉外科)。这家手术机器人公司,处于行业霸主地位,占据全球市场份额超过80%,类似于芯片领域ASML阿斯麦光刻般的存在

知情郎·眼|专利情报
新开了栏目—专利情报。
专门分享高精尖领域的牛公司、牛专利、研发动向。
本期讲的是医疗器械领域的大牛公司--Intuitive Surgical,Inc(直觉外科)。
这家手术机器人公司,处于行业霸主地位,占据全球市场份额超过80%,类似于芯片领域ASML阿斯麦光刻般的存在。
人家早已深入研发如何用AI手术机器人代替人类主刀医师了!
附带一提,在德高行全球专利数据库(德高行是全球专利分析及国内外专利申请服务的专家,有专利问题找德高行)里,INTUITIVE SURGICAL OPERATIONS目前有4477件美国专利,包括2730件发明公开、1665件发明授权、外观设计66件。
01直觉外科的故事
Intuitive Surgical, 成立于1995年,总部位于美国加利福尼亚州阳光谷。
公司自行设计、生产及销售达芬奇牌手术系统。
达芬奇手术机器人在医疗系统声名赫赫,无人不知。
之所以那么牛,因为达芬奇这套全自动手术系统可以极大程度地解放外科医生,通过微控操作和视觉成像等多种新技术最大程度地减少病患痛苦,降低失败几率。
早年的微创治疗手段比较繁琐,医生需要在患者身上打几个小洞,将器械伸进患者的腹腔或者胸腔,通过器械上的小镜子,就可以在屏幕上看到患者体内的情况,进行手术。
不过,医生不能将手(手太大)伸进患者的体内,所有操作都通过器械间接完成,对医生来说,难度较大。
达芬奇手术机器人则完美解决了一难点。
‘“达芬奇”的手像医生的手,它听得懂医生的指令,但又比医生的手更细更巧,手进不去的地方,它能进去。只要接到指令,它就可以在狭小的空间内自由穿梭。而且它规避了人手抖动的弊端,大大提高了手术的精准性和安全性。

达芬奇手术系统自2000年获得FDA批准进行腹腔手术之后,总共进行了四次更新换代(即系统的平均寿命为5年左右),四代的型号分别是达芬奇,达芬奇S,达芬奇Si和达芬奇Xi/X。达芬奇系统分成三个部件:手术医生操作台,病人端以及显示端。
现今,前列腺切除术在美国几乎已经被机器人包办。达芬奇在过去20年间陆续进入更广泛的应用范围,包括子宫切除术,疝修复手术,结直肠手术,胆囊摘除术,减肥手术等。随着搭配达芬奇的工具,尤其是高级工具日渐完备,系统也向更多的软组织手术类型开展应用。
截止到2021年底,达芬奇全球安装活跃系统达到6700台以上,去年全年通过达芬奇总共完成超过150万台手术。目前公司市值1000亿美元。
国内医院要是没有一套达芬奇手术机器人,都不好意思叫医院!
今天,知情郎就专门解读下直觉外科公司的最新专利,看看行业顶级公司最新研发动向,由于是全英文的国外医疗器械最新专利,很多专业术语靠机器+人工的翻译未必准确,请见谅。
02侧视微创手术器械

发明的领域
本发明的各个方面与用于微创手术的系统和程序有关。特别是用于这种系统的远程操作系统。
背景技术
微创手术有各种名称(如内窥镜,腹腔镜,关节镜,内管孔、钥匙孔等),在工作的解剖领域,这种手术包括使用手持和远程操作/远程操作/远程呈现(机器人辅助/远程机器人)设备,如由加州森尼维尔的直观外科公司制造的daVincif外科系统。
诊断(如活检)和手术程序都已明了。器械可以通过手术切口或自然孔经皮插入患者体内。
一种新的实验性微创手术变异是自然孔腔内内镜下镜(注)。
器械通过一个自然孔(口、鼻孔、耳道、肛门、阴道、尿道)进入,并通过体内的腔内切口(如胃或结肠壁)继续进入手术部位。
虽然使用达芬奇手术系统的远程手术提供了很大的好处,例如,许多手持手术,对于一些病人和某些解剖区域,达芬奇手术系统也有无法有效触达的手术部位。
此外,进一步减少切口的大小和数量有助于患者的恢复,并有助于减少患者的创伤和不适。
所以要考虑大量的力学、运动学,来优化达芬奇手术系统,专利提供了一种设计思路。
自由度数(DOFs)是指唯一识别系统的姿态配置的独立可变变量的数量。
由于机器人操纵器是将(输入)关节空间映射到(输出)笛卡尔空间的运动学链,因此DOF的概念可以用这两个空间中的任何一个来表示。
特别地,关节自由度集是所有独立控制关节的关节变量集。不失一般性,关节是提供单一平移(棱柱形关节)或旋转(旋转关节)DOF的机制。
从运动学建模的角度来看,任何提供多个DOF运动的机制都被考虑为两个或多个独立的关节。笛卡尔自由度集通常由三个平移(位置)变量(如波动、起伏、摇摆)和三个旋转(方向)变量(如欧拉角或滚动/间距/弧角)表示,它们描述了末端执行器(或尖端)坐标系相对于给定参考笛卡尔坐标系的位置和方向。
例如,安装在两个独立且垂直的轨道上的平面机构能够控制两个轨道(棱柱自由度)所跨越区域内的xy位置。如果末端执行器可以围绕垂直于轨道平面的轴线旋转,则有三个输入自由度(两个轨道位置和弧角),对应于三个输出自由度(x/y位置和方向角),
虽然笛卡尔自由度的数量最多是6,条件中所有的翻译和定向变量是独立控制,联合自由度的数量通常是设计选择的结果,涉及考虑的机制的复杂性和任务规范。
因此,联合自由度的数目可以大于、等于或小于6。
对于非冗余的运动学链,独立控制的关节的数量等于末端执行器框架的移动度。对于一定数量的棱柱形和旋转旋转自由度,末端执行器框架在笛卡尔空间中具有相同数量的自由度(奇异结构除外),这将对应于平移(x/y/z位置)和旋转(滚动/俯仰/偏航方向)运动的组合。?在具有冗余或“失效”运动链(如机械操纵器)的情况下,输入和输出自由度之间的区别是非常重要的。特别是,“有缺陷”的操纵器少于6个独立控制的接头,因此没有能力完全控制末端执行器的位置和方向。
相反,有缺陷的操纵器只能控制位置和方向变量的一个子集。
另一方面,冗余操纵器有6个以上的联合自由度。因此,冗余机械手可以使用多个关节配置来建立所需的6-DOFend效应器姿态,换句话说,加调自由度不仅可以用来控制末端效应器的位置和方向,还可以用来控制操纵器本身的“形状”。
除了运动学自由度,机构可能有其他自由度,如夹持爪或剪刀刀片的旋转杠杆运动。考虑指定自由度的空间的参考系也很重要。
例如,关节空间中的一个DOF变化(例如,两个链接之间的关节旋转)可能导致一种运动,该运动结合了笛卡尔平移和定向变量的变化(远端尖端的框架通过空间旋转和翻译)。运动学描述了从一个测量空间转换到另一个测量空间的过程。
例如,使用联合空间测量来确定运动链顶端参考系的笛卡尔空间位置和方向是“正向”运动学。使用笛卡尔空间顶端的参考系位置和方向来确定所需的关节位置是“逆”运动学。如果存在一个旋转关节,运动学涉及非线性(三角)功能。
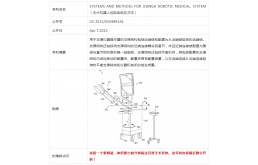
根据本发明的各个方面,通过导管插入一种手术器械。手术器械在导管的中间位置出口,并在导管离开时朝向基本平行于导管的纵向轴,立体图像捕获组件位于导管的中间位置和导管的远端之间。图像捕获组件的视场通常垂直于导管的纵向轴。导管被连接,以允许移动图像捕捉组件。手术器械和导管由端脉冲控制。
03体积更小的手术机器人

技术背景
微创医疗技术旨在减少在医疗手术过程中受到损伤的组织数量,从而减少患者的康复时间、不适和有害的副作用。
这种小型侵入性技术可以通过患者解剖中的自然孔或通过一个或多个手术切口进行。
通过这些自然的孔或切口,操作者(如医生)可以插入微创医疗器械(包括手术、诊断、穿刺或活检器械)来到达目标组织的定位。
其中一种微创技术是使用灵活和/或可操纵的细长装置,如柔性导管,它可以插入解剖通道,并导航到患者解剖结构内感兴趣的区域。
医务人员对这种细长装置的控制涉及对若干自由度的管理,包括至少对细长装置的插入和回缩的管理,以及对装置的转向。
此外,还可以支持不同的操作模式。
一些微创医疗器械可以通过远程操作或以其他计算机辅助。
在将医疗器械连接到远程操作操纵器后,可以通过远程操作或手动操纵操纵器来调整器械。当调整仪器时,可能需要改变仪器的位置(例如,垂直和/或水平),同时主保持仪器的恒定方向。例如,在调整仪器的垂直或水平位置时,可以保持仪器相对于地面的方向。
需要通用的系统和方法,以允许仪器的调整,同时保持仪器的方向。
本发明提供了一种医疗系统。该系统可包括包括近端链接和远端链接的支撑结构。以更精炼的装置和结构,支持微创医疗。
04AI 手术机器人!

本公开通常涉及机器人手术,更具体地涉及利用人工智能操作手术机器人(例如,执行椎板切除术)的手术,进一步还包括利用图像识别系统的人工智能引导系统。
技术背景
早在3500年前,埃及的医生就一直在进行侵入性手术。尽管从那以后我们的工具和知识有所提高,但直到最近,手术仍然是人类手的手工任务。
大约15年前,直觉外科公司的达·芬奇手术机器人是一种新的手术设备,通常用于帮助外科医生更精确,特别是在手术过程中消除自然的手部震颤。
自从直觉外科公司的达·芬奇外科机器人的到来。
还有许多其他的外科手术机器人被引进了。
今天,我们正处于一波新的创新浪潮中,其最好的特征是外科机器人与人工智能(AI)和从机器人系统收集的数据的融合。
我们现在正在通过收集和分析通过这些机器人视觉系统的数据来“数字化”手术,如运动跟踪、捕捉图像等。这样就可以增强手术过程了。
例如,微创脊柱手术最近随着内窥镜的使用,成像设备的创新和医学机器人的进步。值得庆幸的是,与传统手术相比,患者疼痛少,切口小,并发症少,患者恢复正常活动快。外科医生现在可以用一个非常小的内窥镜取出破裂的椎间盘,并借助微型相机和不大于0.5英寸的切口修复疼痛的椎间盘。
机器人和计算机现在在协助外科医生进行这些微创手术中发挥着越来越大的作用,支架坐在一个车站上,看着显示放大手术视野的监视器。计算机模拟并增强了外科医生的手的移动能力。
在这种情况下,计算机通过抑制外科医生手中的微小震颤,使运动更加精确,这可能会增加在高倍显微镜下进行手术的稀释度。
即使是机器人增强了外科医生的能力。要掌握这项技术,需要进行大量的练习。
机器人也被用来帮助完成可能会让外科医生感到疲劳的任务。
这个想法形成了“伊索”,这是一种自然语言语音激活的机械臂,在内窥镜手术过程中为外科医生提供照相机和内窥镜组件。
这一创新减少了人们完成这项任务的需要,并通过精确地移动到外科医生命令机器人的地方,提供稳定的图像来提高结果。
计算机也被用于图像引导系统,为外科医生提供实时图像,并允许他导航到脊柱上的特定位置。外科医生可以使用术前获得的数字信息,如MRI或CAT扫描,或使用实时透视x射线来开发脊柱的三维图像,并确定放置在脊柱上的探针的确切位置。
这种技术已被证明可以减少有时用于固定脊柱的椎弓根螺钉的放置错误。此外,这项技术将扩大到允许更精确的靶向问题,最少的切口和更少的手术并发症。
在微创脊柱手术中使用机器人技术和计算机,使手术程序更准确,缩短了手术时间,减少了并发症。由于手术时的实时三维成像,预计计算机增强图像引导系统将提高这些程序的精度。诊断学研究将通过数字方式传输到手术室,并计划进行监测,以进一步帮助外科医生在对患者创伤最小的情况下进行正确的手术。
如今,基本上有三种人工智能用于外科手术。第一个是IBM的沃森系统。它使用了一个专家的视频系统。沃森存储了稳定的医疗信息,并对外科医生的自然语言查询做出回应。沃森成为了一名智能的外科助手。?其次是“机器学习”算法。
这些算法使用无监督模式匹配算法,该算法将帮助医生识别一系列症状结果何时与先前特定手术问题或结果的类似模式相匹配。这将帮助外科医生在他们身边拥有一个学习机器。?第三种是像“AlphaGo”这样的技术,它通过获取数据来训练自己找到自己的模式。
所有的手术数据和结果都被创建出来,AlphaGo将会自己做手术,看看它是否能首先复制结果,然后改善结果。?传统的机器人手术方法并没有在特定领域采用Al,比如脊柱手术,利用人工智能进行图像识别。
因此,需要新的方法来利用人工智能来改善机器人外科外科手术的结果,如微创机器人脊柱手术程序。
一些实施案例
在一些实施例中,该系统可以获取感兴趣区域的一个或多个图像,并且该图像可以被发送到图像识别系统。
这些图像可以是静止的图像或视频。如果该系统识别出了目标组织,就可以产生一个手术计划。
例如,可以通过比较一个或多个图像与参考图像来识别目标组织。
这种比较可以用来识别要移除的组织,确定手术何时完成等。在一些实施例中,可以通过比较当前程序中受机器人影响的组织层数与参考数据(例如,在统计上相似的患者中完成该手术步骤的平均层数)来识别目标组织。
对于外科医生来说,组织按照手术计划的规定受到影响,这个过程不断重复,直到目标组织被移除。然后,机器人停止其进展,并将图像呈现给外科医生来定义。
如果外科医生将该组织定义为目标组织,则更新图像识别数据库中识别的图像库,机器人继续前进。这个过程可以应用于脊柱手术过程中的每个步骤,详所述。?
在某些实施例中,支持系统和方法可以利用人工智能操作一个或多个外科机器人系统,包括外科机器人设备、人工智能指导系统、图像识别系统、图像识别数据库和/或具有传感器数据、电子病历的过去程序数据库。和/或成像数据。
该图像识别系统可以识别患者体内存在的组织类型。如果它是所需的或靶向的组织类型,Al引导系统可以使用手术机器人上的末端执行器移除该组织。
如果图像识别系统识别出不是执行手术所需的组织类型,外科医生可以定义组织类型。该系统可以根据预设的标准、医生的输入等条件,来识别解剖特征、异常特征、肿瘤边缘、组织特征、组织类型、组织界面或其组合。
例如,图像控制-认知系统可以评估图像来识别地标,并至少部分地基于这些地标生成手术计划。这些地标可以被该系统识别出来。医生,或两者兼而有之。在某些过程中,标志物可以是可识别的解剖特征(例如,棘突,骨突1、撕裂性骨内膜、神经、脊髓、椎间盘、椎体终板等)沿着病人的脊柱来制定一个手术计划。
在某些实施例中,系统和方法可以使用手术前和/或手术期间获得的图像来引导机器人手术设备、末端执行器、手术工具等,内窥镜可以用作引导线。内窥镜可以不断地与前后(AP)视图相互作用,使外科医生可以不断地观察内窥镜。
这个系统可以扩展到覆盖整个手术过程。使用内窥镜作为导丝,可以将内窥镜定位在患者内部,作为手术导航程序的额外参考点。
原文标题 : 【专利情报】AI手术机器人代替主刀医师?手术机器人霸主直觉外科新专利解读
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

