LaserNet:自动驾驶目标探测器
本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。
本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理激光雷达数据。在激光雷达视场范围内的操作有许多挑战,不仅包括遮挡和尺度变化,还有基于传感器如何捕获数据来提供全流程信息。
本文介绍的方法是使用一个全卷积网络来预测每个点在三维物体上的多模态分布,然后有效地融合这些多模态分布来生成对每个对象的预测。实验表明,把每个检测建模看作一个分布,能获得更好的整体检测性能。基准测试结果表明,相比其他的检测方法,本方法的运行时间更少;在训练大量数据来克服视场范围目标检测问题上,本方法获得最佳性能。
LaserNet通过以下几个步骤实现三维检测:
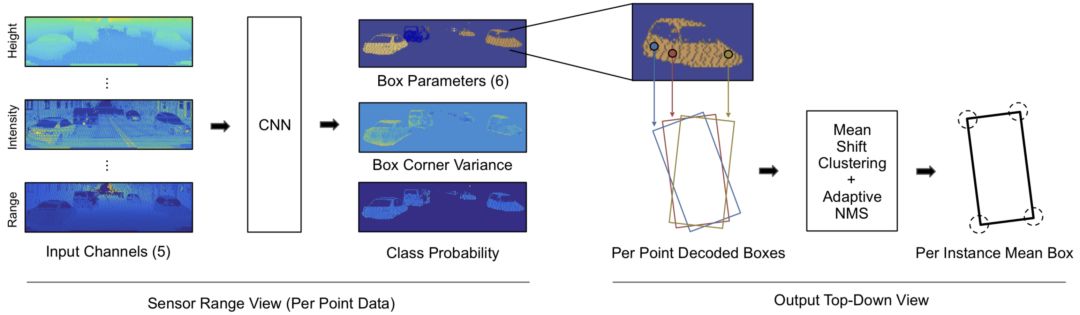
使用传感器的固有范围视场来构建一个密集的输入图像;
图像通过全卷积网络生成一组预测;
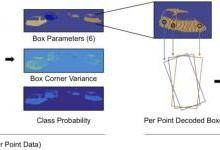
对于图像中的每个激光雷达点,预测一个类概率,并在俯视图中对边界框架进行概率分布回归;
每个激光雷达点分布通过均值漂移聚类进行组合,以降低单个预测中的噪声;
检测器进行端到端训练,在边界框架上定义损失;
用一种新的自适应非最大抑制(NMS)算法来消除重叠的边框分布。
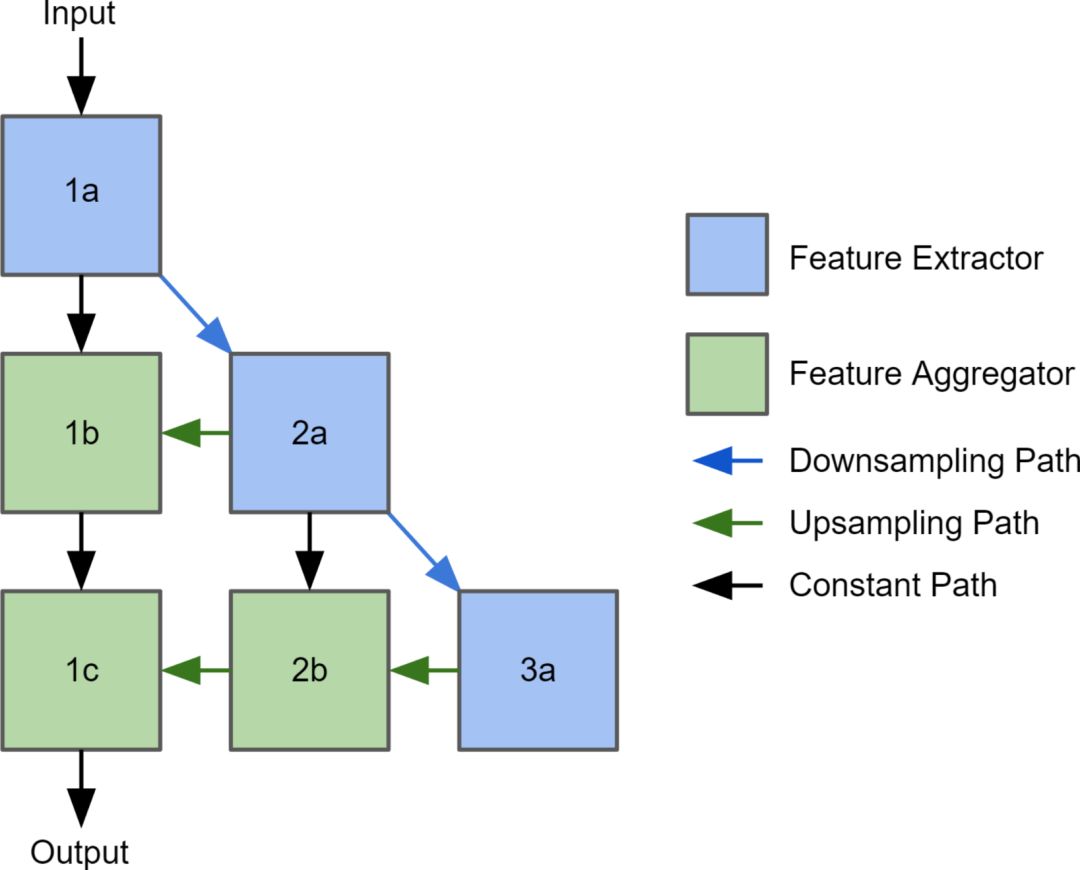
上图为深层聚合网络架构。列表示不同的分辨率级别,行表示聚合阶段。
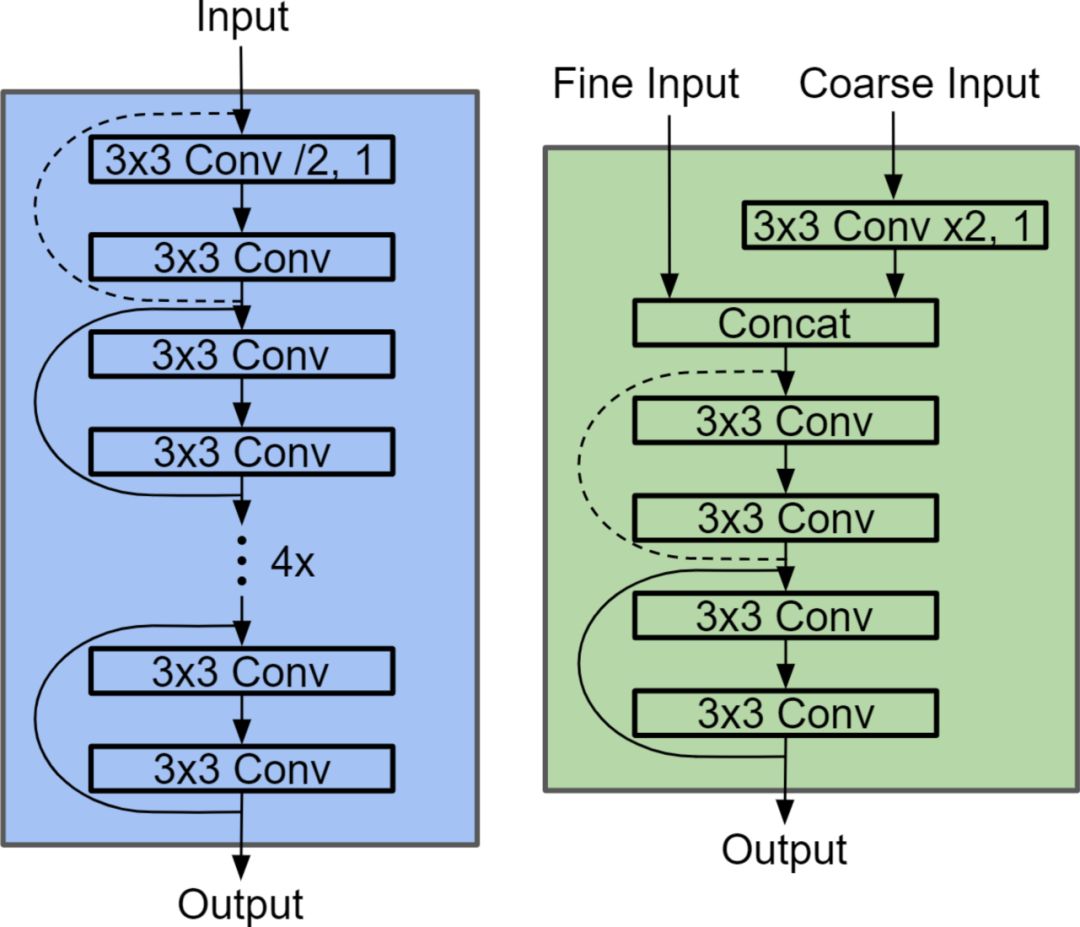
上图为特征提取模块(左)和特征聚合模块(右)。虚线表示对特征图进行了卷积。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏
有冇SmartoneAI,致力于通过分享全球优质AI工具、资源和资讯,帮助大家更早地、更好地了解和使用AI,让AI成为你的得力助手,工作更高效,生活更轻松。按下Ctrl+D或⌘+D收藏本站~

