一文教你使用Python+OpenCV实现打乒乓球游戏
CodeBullet是我最喜欢的YouTuber之一,他曾经尝试创建一个人机对战的乒乓球游戏,但遗憾的是,对于他的成果没有对计算机视觉有太大影响。他是个很幽默及技术很强的人,如果你考虑阅读这篇文章的其余部分,我强烈建议你观看他的视频

CodeBullet是我最喜欢的YouTuber之一,他曾经尝试创建一个人机对战的乒乓球游戏,但遗憾的是,对于他的成果没有对计算机视觉有太大影响。他是个很幽默及技术很强的人,如果你考虑阅读这篇文章的其余部分,我强烈建议你观看他的视频。
人机对战的乒乓球游戏似乎是一个非常有趣且简单的任务,所以我也想尝试一下。在这篇文章中,我将概述一些我对该项目研究过的一些因素,如果你希望在任何类似的项目上工作,这些因素可能会有所帮助。使用计算机视觉的好处在于我可以使用已经构建的游戏来处理图像。话虽如此,我们将使用在ponggame.org上且CodeBullet相同的游戏版本。它具有2人模式,因此我可以与自己的AI对抗;我做到了,这确实很难……
捕捉屏幕第一件事就是捕捉屏幕。我想确保我的帧速率尽可能快,为此我发现MSS是一个很棒的python包。有了它,我很容易就达到60帧/秒的最高速度,如果使用PIL,则我只能得到大约20帧每秒的速度。
为了简单起见,我们需要定义paddle的位置。我们可以使用几种不同的方法来完成,但我认为最简单的方法是对每个Paddle的区域进行遮罩,然后运行连接的组件来找到Paddle对象。
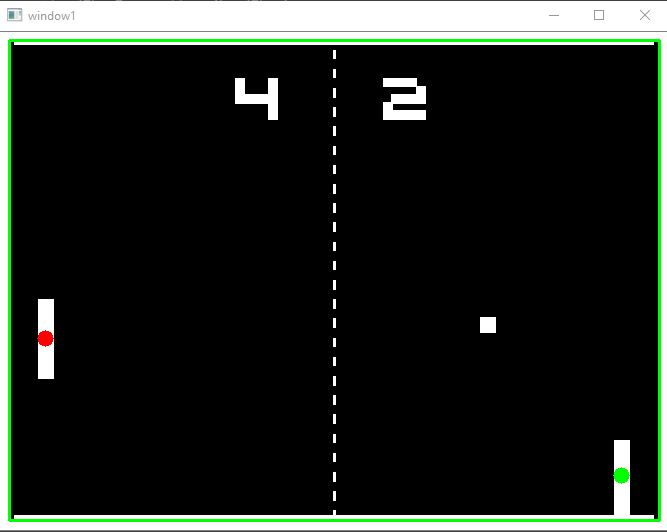
下面是一段代码:def get_objects_in_masked_region(img, vertices, connectivity = 8): ''':return connected components with stats in masked region [0] retval number of total labels 0 is background [1] labels image [2] stats[0] leftmostx, [1] topmosty, [2] horizontal size, [3] vertical size, [4] area [3] centroids ''' mask = np.zeros_like(img) # fill the mask cv2.fillPoly(mask, [vertices], 255) # now only show the area that is the mask mask = cv2.bitwise_and(img, mask) conn = cv2.connectedComponentsWithStats(mask, connectivity, cv2.CV_16U) return conn在上面,“vertices”只是定义遮罩区域的坐标列表,一旦在每个区域内有了对象,我就可以得到它们的质心位置或边界框,但需要注意的一点是OpenCV将背景作为任何连接的组件列表中的第0个对象,因此在本例中,我总是获取第二大的对象,结果如下——右边绿色质心的球拍是玩家的。
移动paddle现在我们有了输出,我们还需要一个输入,为此我求助于一个有用的包和其他人的代码。它使用ctypes来模拟键盘按下,在这种情况下,游戏是用“k”和“m”键来玩的。我这里有扫描码。在测试了它只是随机上下移动后,我们就可以开始跟踪了。乒乓球检测下一步是识别并跟踪乒乓球,同样,这也可以用几种方法来处理——其中一种方法是通过使用模板进行对象检测,但是我再次使用了连接的组件和对象属性来完成检测,即乒乓球的区域,因为它是唯一具有尺寸的对象。我知道每当乒乓球穿过或碰到其他白色物体时,我都会遇到误检问题,但我也同样认为只要我能在大多数时间里追踪到它,那么这一切都没问题,毕竟它是直线运动的。如果你看下面的视频,你会看到标记乒乓球的红色圆圈是如何闪烁的,导致这种闪烁的原因是因为它只在每2帧中检测一次。
反弹预测的光线投射到这一步,我们已经有了一个可工作的人工智能。如果我们只是移动球员的球拍,使其处于与乒乓球相同的y轴位置,它的效果是相当不错的,然而当乒乓球得到良好的反弹时,因为球拍太慢了,会遇到跟不上的问题。所以我们需要预测乒乓球的位置,而不是仅仅移动到当前的位置。下面是两种方法的比较。
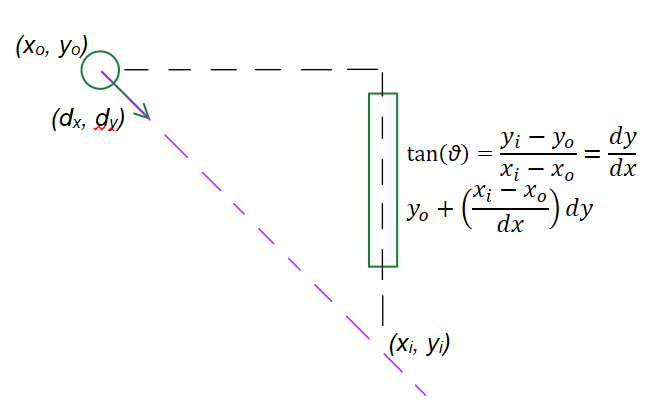
差别并不大,但如果选择了正确的人工智能,这绝对是一场更稳定的胜利。首先我为乒乓球创建了一个位置列表,为了公平起见,我把这个列表的长度控制在5个,因为列表太长的话,需要花费更长的时间才能发现它改变了方向;在得到位置列表后,我使用简单的矢量平均法来平滑并得到方向矢量——如绿色箭头所示;然后吧它标准化成一个单位向量,乘以一个长度以方便可视化。投射光线只是这个的延伸——使前向投影变长。之后我检查了未来的位置是否在顶部和底部区域的边界之外,如果是这样的话,它只是将位置投影回游戏区域了;对于左侧和右侧,它计算出与paddle的x位置相交的位置,并将x和y位置固定到该点,这样可以确保paddle指向正确的位置。如果没有这一点,它通常会走得太远。下面是定义光线的代码,该光线可以预测乒乓球的未来位置:def pong_ray(pong_pos, dir_vec, l_paddle, r_paddle, boundaries, steps = 250): future_pts_list = [] for i in range(steps): x_tmp = int(i * dir_vect[0] + pong_pos[0]) y_tmp = int(i * dir_vect[1] + pong_pos[1])
if y_tmp > boundaries[3]: #bottom y_end = int(2*boundaries[3] - y_tmp) x_end = x_tmp
elif y_tmp ##stop where paddle can reach if x_tmp > r_paddle[0]: #right x_end = int(boundaries[1]) y_end = int(pong_pos[1] + ((boundaries[1] - pong_pos[0])/dir_vec[0])*dir_vec[1])
elif x_tmp else: x_end = x_tmp
end_pos = (x_end, y_end) future_pts_list.append(end_pos)
return future_pts_list在上文中,还没说明确定paddle对目标的左或右位置的截距的计算方法,该计算过程我们基本上是通过相似三角形来实现的,图片和方程如下所示。我们计算在边界中给定的paddle的x位置截距之后,我们就可以计算出乒乓球将移动多远了,并将其添加到当前的y位置。
paddle虽然看起来是笔直的,但实际上有一个弯曲的反弹面,也就是说,如果你用球拍向两端击球,球会反弹,就像球拍有角度一样,因此我允许球拍击中边缘,这增加了人工智能的攻击性,使乒乓球四处飞舞。结论尽管我的实现方法是为这种特定的乒乓球有限实现而设计的,但相同的概念和代码也可以用于其它问题中——只需要改变一些预处理步骤。我们也可以使用另一种方法来实现该项目,即通过强化学习或简单的conv-net等方法,但我比较喜欢这种经典方法。因为使用经典的方法,我不需要健壮的通用性或困难的图像处理步骤。正如我提到的,本版本的乒乓球是2人对战模式的,在游戏过程中我无法打败我自己的AI…
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

