现代CNN架构中使用的不同模块
今天,我们将看到现代CNN架构中使用的不同模块,如ResNet、MobileNet、EfficientNet,以及它们在PyTorch中的实现。让我们创建一个通用的conv-norm-act层from
今天,我们将看到现代CNN架构中使用的不同模块,如ResNet、MobileNet、EfficientNet,以及它们在PyTorch中的实现。
让我们创建一个通用的conv-norm-act层
from functools import partial
from torch import nn
class ConvNormAct(nn.Sequential):
def __init__(
self,
in_features: int,
out_features: int,
kernel_size: int,
norm: nn.Module = nn.BatchNorm2d,
act: nn.Module = nn.ReLU,
**kwargs
):
super().__init__(
nn.Conv2d(
in_features,
out_features,
kernel_size=kernel_size,
padding=kernel_size // 2,
),
norm(out_features),
act(),
)
Conv1X1BnReLU = partial(ConvNormAct, kernel_size=1)
Conv3X3BnReLU = partial(ConvNormAct, kernel_size=3)
import torch
x = torch.randn((1, 32, 56, 56))
Conv1X1BnReLU(32, 64)(x).shape
torch.Size([1, 64, 56, 56])
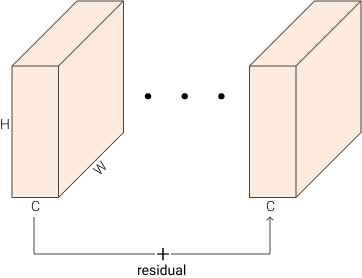
残差连接残差连接用于ResNet中,想法是将输入添加到输出中,输出=层+输入。下图可能会帮助你将其可视化。但是,我的意思是它只是一个+运算符。残差操作提高了梯度传播的能力,允许有效地训练具有100层以上的网络。
在PyTorch中,我们可以轻松创建一个ResidualAdd层
from torch import nn
from torch import Tensor
class ResidualAdd(nn.Module):
def __init__(self, block: nn.Module):
super().__init__()
self.block = block
def forward(self, x: Tensor) -> Tensor:
res = x
x = self.block(x)
x += res
return x
ResidualAdd(
nn.Conv2d(32, 32, kernel_size=1)
)(x).shape
shortcut
有时你的残差没有相同的输出维度,所以我们不能添加它们。我们可以使用shortcut中的卷积投射输入,以匹配输出特征:
from typing import Optional
class ResidualAdd(nn.Module):
def __init__(self, block: nn.Module, shortcut: Optional[nn.Module] = None):
super().__init__()
self.block = block
self.shortcut = shortcut
def forward(self, x: Tensor) -> Tensor:
res = x
x = self.block(x)
if self.shortcut:
res = self.shortcut(res)
x += res
return x
ResidualAdd(
nn.Conv2d(32, 64, kernel_size=1),
shortcut=nn.Conv2d(32, 64, kernel_size=1)
)(x).shape
BottleNeck Blocks
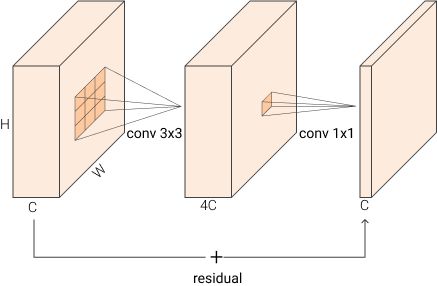
在图像识别的深度残差学习中引入了Bottlenecks。Bottlenecks块接受大小为BxCxHxW的输入,它首先使用1x1 卷积将其变为BxC/rxHxW,然后应用3x3 卷积,最后将输出重新映射到与输入相同的特征维度BxCxHxW,然后再次使用1x1卷积。这比使用三个3x3卷积更快。
因为首先减少了输入,所以我们称之为“Bottlenecks”。下图显示了该块,我们在原始实现中使用了r=4
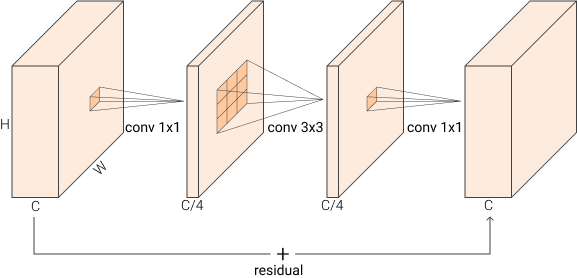
前两个卷积之后是batchnorm和一个非线性激活层,而最后一个非线性层在加法后应用。
在PyTorch中为:
from torch import nn
class BottleNeck(nn.Sequential):
def __init__(self, in_features: int, out_features: int, reduction: int = 4):
reduced_features = out_features // reduction
super().__init__(
nn.Sequential(
ResidualAdd(
nn.Sequential(
# wide -> narrow
Conv1X1BnReLU(in_features, reduced_features),
# narrow -> narrow
Conv3X3BnReLU(reduced_features, reduced_features),
# narrow -> wide
Conv1X1BnReLU(reduced_features, out_features, act=nn.Identity),
),
shortcut=Conv1X1BnReLU(in_features, out_features)
if in_features != out_features
else None,
),
nn.ReLU(),
)
)
BottleNeck(32, 64)(x).shape
请注意,仅当输入和输出特征不同时,我们才应用shortcut。
在实践中,当我们希望减小空间维数时,在卷积中使用stride=2。
Linear BottleNecks
MobileNet V2中引入了Linear Bottleneck。Linear BottleNecks是没有激活函数的Bottlenecks块。
在论文的第3.2节中,他们详细讨论了为什么在输出之前存在非线性会损害性能。简而言之,非线性函数ReLU在<0时设为0会导致破坏信息。因此,在Bottlenecks中删除nn.ReLU你就可以拥有Linear BottleNecks。
倒残差
MobileNet V2中再次引入了倒残差。
倒残差块是反向的Bottlenecks层。它们通过第一次卷积扩展特征,而不是减少特征。
下图应该可以清楚地说明这一点
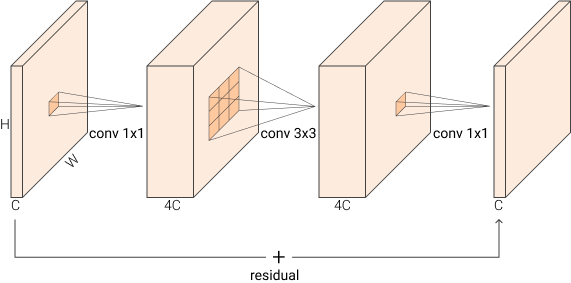
我们从BxCxHxW到->BxCxHxW->BxCxHxW->BxCxHxW,其中e是膨胀率,它被设置为4。而不是像在正常的Bottlenecks区那样变宽->变窄->变宽,而是相反,变窄->变宽->变窄。
在PyTorch中,实现如下
class InvertedResidual(nn.Sequential):
def __init__(self, in_features: int, out_features: int, expansion: int = 4):
expanded_features = in_features * expansion
super().__init__(
nn.Sequential(
ResidualAdd(
nn.Sequential(
# narrow -> wide
Conv1X1BnReLU(in_features, expanded_features),
# wide -> wide
Conv3X3BnReLU(expanded_features, expanded_features),
# wide -> narrow
Conv1X1BnReLU(expanded_features, out_features, act=nn.Identity),
),
shortcut=Conv1X1BnReLU(in_features, out_features)
if in_features != out_features
else None,
),
nn.ReLU(),
)
)
InvertedResidual(32, 64)(x).shape
在MobileNet中,只有当输入和输出特征匹配时,才会应用残差连接
class MobileNetLikeBlock(nn.Sequential):
def __init__(self, in_features: int, out_features: int, expansion: int = 4):
# use ResidualAdd if features match, otherwise a normal Sequential
residual = ResidualAdd if in_features == out_features else nn.Sequential
expanded_features = in_features * expansion
super().__init__(
nn.Sequential(
residual(
nn.Sequential(
# narrow -> wide
Conv1X1BnReLU(in_features, expanded_features),
# wide -> wide
Conv3X3BnReLU(expanded_features, expanded_features),
# wide -> narrow
Conv1X1BnReLU(expanded_features, out_features, act=nn.Identity),
),
),
nn.ReLU(),
)
)
MobileNetLikeBlock(32, 64)(x).shape
MobileNetLikeBlock(32, 32)(x).shape
MBConv
MobileNet V2的构建块被称为MBConv。MBConv是具有深度可分离卷积的倒残差的Linear BottleNecks层。
深度可分离卷积
深度可分离卷积采用一种技巧,将一个正常的3x3卷积夹在两个卷积中,以减少参数数量。
第一个对每个输入的通道应用单个3x3滤波器,另一个对所有通道应用1x1滤波器。
这与正常的3x3卷积相同,但你节省了参数。
然而它比我们现有硬件上的普通3x3慢得多。
下图显示了这个想法
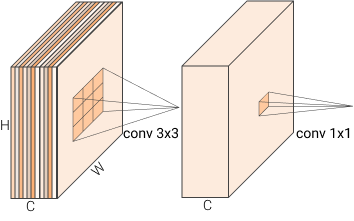
通道中的不同颜色表示每个通道应用的单个过滤器
PyTorch中:
class DepthWiseSeparableConv(nn.Sequential):
def __init__(self, in_features: int, out_features: int):
super().__init__(
nn.Conv2d(in_features, in_features, kernel_size=3, groups=in_features),
nn.Conv2d(in_features, out_features, kernel_size=1)
)
DepthWiseSeparableConv(32, 64)(x).shape
第一次卷积通常称为depth,而第二次卷积称为point。让我们统计参数量
sum(p.numel() for p in DepthWiseSeparableConv(32, 64).parameters() if p.requires_grad)
输出:2432
让我们看一个普通的Conv2d
sum(p.numel() for p in nn.Conv2d(32, 64, kernel_size=3).parameters() if p.requires_grad)
输出:18496
有很大的区别
实现MBConv
那么,让我们创建一个完整的MBConv。
MBConv有几个重要的细节,标准化应用于深度和点卷积,非线性仅应用于深度卷积(Linear Bottlenecks)。
class MBConv(nn.Sequential):
def __init__(self, in_features: int, out_features: int, expansion: int = 4):
residual = ResidualAdd if in_features == out_features else nn.Sequential
expanded_features = in_features * expansion
super().__init__(
nn.Sequential(
residual(
nn.Sequential(
# narrow -> wide
Conv1X1BnReLU(in_features,
expanded_features,
act=nn.ReLU6
),
# wide -> wide
Conv3X3BnReLU(expanded_features,
expanded_features,
groups=expanded_features,
act=nn.ReLU6
),
# here you can apply SE
# wide -> narrow
Conv1X1BnReLU(expanded_features, out_features, act=nn.Identity),
),
),
nn.ReLU(),
)
)
MBConv(32, 64)(x).shape
Fused MBConv
EfficientNetV2中引入了融合倒残差
所以基本上,由于深度卷积比较慢,他们将第一个和第二个卷积融合在一个3x3的卷积中(第3.2节)。
class FusedMBConv(nn.Sequential):
def __init__(self, in_features: int, out_features: int, expansion: int = 4):
residual = ResidualAdd if in_features == out_features else nn.Sequential
expanded_features = in_features * expansion
super().__init__(
nn.Sequential(
residual(
nn.Sequential(
Conv3X3BnReLU(in_features,
expanded_features,
act=nn.ReLU6
),
# here you can apply SE
# wide -> narrow
Conv1X1BnReLU(expanded_features, out_features, act=nn.Identity),
),
),
nn.ReLU(),
)
)
MBConv(32, 64)(x).shape
结论
现在你应该知道所有这些块之间的区别以及它们背后的原因了!
原文标题 : Residual, BottleNeck, Linear BottleNeck, MBConv解释
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

