驾驶员嗜睡分类 - 深度学习
瞌睡检测是一种汽车安全技术,有助于防止驾驶员在驾驶时睡着了造成的事故。根据 NHTSA(美国国家公路交通安全管理局)的数据,警方报告的 91,000 起车祸涉及疲劳驾驶。这些车祸导致 2017 年估计有 50,000 人受伤和近 800 人死亡

瞌睡检测是一种汽车安全技术,有助于防止驾驶员在驾驶时睡着了造成的事故。根据 NHTSA(美国国家公路交通安全管理局)的数据,警方报告的 91,000 起车祸涉及疲劳驾驶。这些车祸导致 2017 年估计有 50,000 人受伤和近 800 人死亡。目前,方法主要集中在使用深度学习或机器学习技术进行眨眼检测,但是,如果司机戴墨镜怎么办?
如果我们同时考虑驾驶员的头部倾斜、打哈欠和其他因素会怎样?是的,这正是本文所做的。
在进入特征提取部分之前,从“ULg 多模态嗜睡数据库”(也称为DROZY )中获取数据,该数据库包含各种类型的嗜睡相关数据(信号、图像等)。
该数据集包含大约 45 个视频剪辑,这些剪辑按照卡罗林斯卡嗜睡量表 (KSS) 进行标记。KSS 量表范围从 1 到 9,其中 1 表示非常警觉,9 表示非常困。
由于该数据集中缺少数据和标签,因此将标签从 1-9 转换为 1-3,分别表示无嗜睡、中度嗜睡和高度嗜睡。本来会使用视频分类过程,但由于数据不够,先提取特征并将它们用作我的模型输入。这样,模型将使用更少的数据达到更准确的效果。
特征提取
对于这个特定任务,我将使用 TensorFlow-GPU 2.6 和 python 3.6 以及使用 pip 预安装的库 open-cv、dlib、scipy。
特征提取所需的所有库:
from scipy.spatial import distance as dist
from imutils.video import FileVideoStream
from imutils.video import VideoStream
from imutils import face_utils
import numpy as np
import argparse
import imutils
import time
import dlib
import cv2
import datetime
import csv
import os
import math
平均眨眼持续时间:眼睛纵横比低于 0.3 然后高于 0.3 的持续时间被检测为眨眼。眨眼发生的时间称为眨眼持续时间。平均每分钟眨眼持续时间以计算平均眨眼持续时间。
# grab the indexes of the facial landmarks for the left and
# right eye, respectively
(lStart, lEnd) = face_utils.FACIAL_LANDMARKS_IDXS["left_eye"]
(rStart, rEnd) = face_utils.FACIAL_LANDMARKS_IDXS["right_eye"]
def eye_aspect_ratio(eye):
A = dist.euclidean(eye[1], eye[5])
B = dist.euclidean(eye[2], eye[4])
C = dist.euclidean(eye[0], eye[3])
ear = (A + B) / (2.0 * C)
return ear
眨眼频率:每分钟眨眼的次数称为眨眼频率。
def time_difference(start_time, end_time):
start_time = start_time.split()
for i in range(0,8):
hours = int(start_time[3])
mins = int(start_time[4])
secs = int(start_time[5])
milisecs = int(start_time[6])
microsecs = int(start_time[7])
#converting it to microsecs
t1, m1, s1, ms1, mis1 = hours, mins, secs, milisecs, microsecs
start_time_microsecs = mis1 + 1000*(ms1 + 1000*(s1 + 60*(m1 + 60*t1)))
end_time = end_time.split()
for x in range(0,8,1):
hours = int(end_time[3])
mins = int(end_time[4])
secs = int(end_time[5])
milisecs = int(end_time[6])
microsecs = int(end_time[7])
t2, m2, s2, ms2, mis2 = hours, mins, secs, milisecs, microsecs
end_time_microsecs = mis2 + 1000*(ms2 + 1000*(s2 + 60*(m2 + 60*t2)))
#finding the duration of blink
time_differ = end_time_microsecs - start_time_microsecs
#print 'time_difference in microsecs = ', time_differ
return time_differ
嘴部纵横比:计算 MAR 以检测一个人是否在打哈欠。
(omouth, emouth) = face_utils.FACIAL_LANDMARKS_IDXS["mouth"]
def mouth_aspect_ratio(mouth):
# compute the euclidean distances between the two sets of
# vertical mouth landmarks (x, y)-coordinates
A = dist.euclidean(mouth[2], mouth[10]) # 51, 59
B = dist.euclidean(mouth[4], mouth[8]) # 53, 57
# compute the euclidean distance between the horizontal
# mouth landmark (x, y)-coordinates
C = dist.euclidean(mouth[0], mouth[6]) # 49, 55
# compute the mouth aspect ratio
mar = (A + B) / (2.0 * C)
# return the mouth aspect ratio
return mar
头部姿态:每帧计算不同的角度,得到头部的姿态。
def getHeadTiltAndCoords(size, image_points, frame_height):
focal_length = size[1]
center = (size[1]/2, size[0]/2)
camera_matrix = np.array([[focal_length, 0, center[0]], [
0, focal_length, center[1]], [0, 0, 1]], dtype="double")
dist_coeffs = np.zeros((4, 1)) # Assuming no lens distortion
(_, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points,
camera_matrix, dist_coeffs,
flags = cv2.SOLVEPNP_ITERATIVE) # flags=cv2.CV_ITERATIVE)
(nose_end_point2D, _) = cv2.projectPoints(np.array(
[(0.0, 0.0, 1000.0)]), rotation_vector, translation_vector, camera_matrix, dist_coeffs)
#get rotation matrix from the rotation vector
rotation_matrix, _ = cv2.Rodrigues(rotation_vector)
#calculate head tilt angle in degrees
head_tilt_degree = abs(
[-180] - np.rad2deg([rotationMatrixToEulerAngles(rotation_matrix)[0]]))
#calculate starting and ending points for the two lines for illustration
starting_point = (int(image_points[0][0]), int(image_points[0][1]))
ending_point = (int(nose_end_point2D[0][0][0]), int(nose_end_point2D[0][0][1]))
ending_point_alternate = (ending_point[0], frame_height // 2)
return head_tilt_degree, starting_point, ending_point, ending_point_alternate
这就是我的特征提取过程中的样子。

是时候制作模型了!
由于我们已经完成了特征选择部分,我们不必构建复杂的模型。我将使用人工神经网络
import numpy as np
import sklearn
from sklearn import preprocessing
#from sklearn.datasets.samples_generator import make_blobs
#from sklearn.preprocessing import LabelEncoder, StandardScaler
import csv
import os
from tensorflow import keras
import random
from keras.models import Sequential
from keras.layers import Dense , Dropout, Activation, BatchNormalization
from keras import regularizers
importmatplotlib.pyplot as plt
#from keras.utils import plot_model
import sklearn
from sklearn.metrics import chaos_matrix
from sklearn.metrics import accuracy_score
from sklearn.metrics import classification_report
import pickle
from keras.utils import np_utils
from keras import optimizers
from keras.models import load_model
这是深度学习中最简单的模型的设计,但由于特征提取而有效。因为我们计算的是每分钟的瞌睡程度,所以要确保你将你的输入连接起来,然后传递给模型。
#designing the model
model=Sequential()
model.add(Dense(64, input_dim=6, activation='relu'))
model.add(Dropout(0.001))
model.add(Dense(64, input_dim=6, activation='relu'))
model.add(Dropout(0.001))
model.add(Dense(32, input_dim=6, activation='relu'))
model.add(Dense(16, input_dim=6, activation='relu'))
model.add(Dense(4, activation='softmax', use_bias=False))
#compile the model
#adam = keras.optimizers.Adam(lr=0.01)
adam = keras.optimizers.Adam(lr=0.001)
model.compile(loss='categorical_crossentropy', optimizer=adam, metrics=['accuracy'])
#fit the model
checkpoint = keras.callbacks.ModelCheckpoint(filepath="trained_models/DrowDet_model(output4).hdf5", period=1)
tbCallBack = keras.callbacks.TensorBoard(log_dir='./scalar',
histogram_freq=0, write_graph=True, write_images=True)
history=model.fit(Xtrain, Ytrain, epochs=50, batch_size=256, callbacks=[checkpoint, tbCallBack], validation_data=(Xval,Yval))
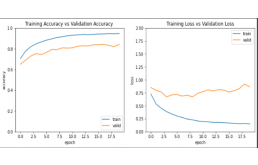
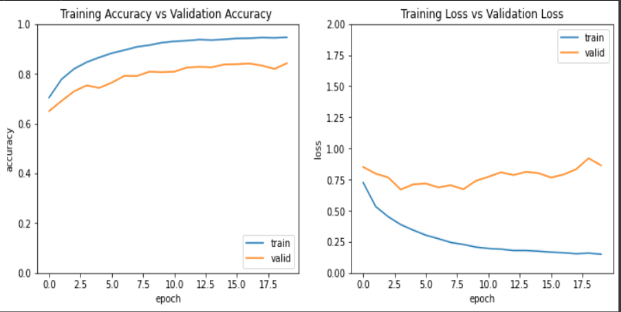
使用准确性与验证准确性和训练损失与验证损失的模型性能。
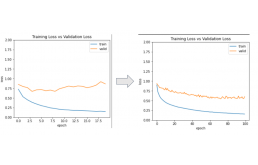
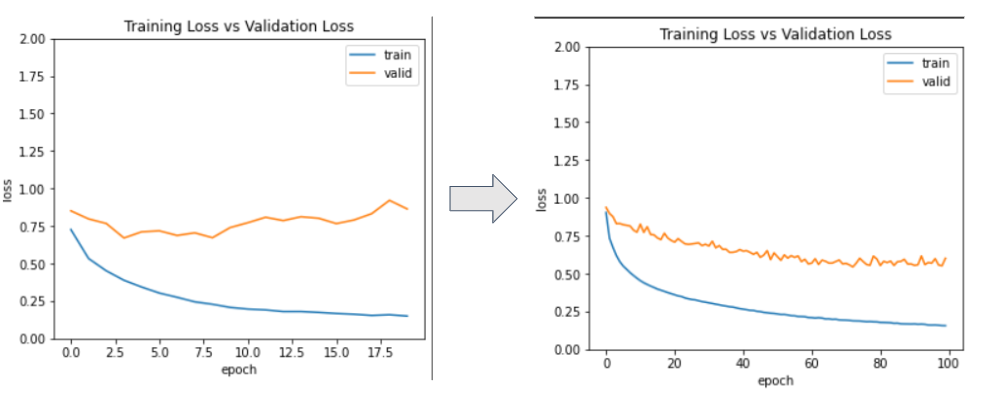
超参数调优模型!我改变了学习率(0.01 -> 0.001),不同的优化器(RMSprop),时期数(20 -> 50)。
使用 Sklearn 的混淆矩阵,我在测试集上评估了模型,得到了 73% 的准确率和 89% 的训练准确率。再使用大约 4 个隐藏层,我在测试集上得到了大约 74% 的准确率,在训练数据集上得到了 93% 的准确率。
原文标题 : 驾驶员嗜睡分类 - 深度学习
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

