机器学习在无人驾驶中的现状及挑战
1月10日,在青岛举行的2019国家智能产业峰会智能驾驶平行论坛上,孙振平研究员结合国内外机器学习相关技术在智能驾驶领域的研究现状和课题组近年来的一些研究成果,向与会人员分享了题为《机器学习在无人驾驶中的应用现状及面临挑战》的精彩报告。

1月10日,在青岛举行的2019国家智能产业峰会智能驾驶平行论坛上,孙振平研究员结合国内外机器学习相关技术在智能驾驶领域的研究现状和课题组近年来的一些研究成果,向与会人员分享了题为《机器学习在无人驾驶中的应用现状及面临挑战》的精彩报告。

国防科技大学智能科学学院无人系统研究所副所长孙振平
谈到国内自动驾驶研究的起源,总绕不开一所有名的高校——国防科技大学。20世纪80年代末,国防科技大学先后研制出基于视觉的CITAVT系列智能车辆。1992年,国防科技大学成功研制出中国第一辆真正意义上的无人驾驶汽车。2011年7月,由一汽集团与国防科技大学共同研制的红旗HQ3无人驾驶汽车完成了286km的面向高速公路的全程无人驾驶试验,而在背后主持研究红旗无人驾驶汽车实现高速长距离无人驾驶的,便是国防科技大学智能科学学院无人系统研究所副所长孙振平研究员。2012年,孙振平研究员作为技术负责人,组织团队研制了我国第一台边防无人巡逻车。同时,他作为主要技术骨干或负责人与团队一起参加了十余次国家自然科学基金委委主办“中国智能车未来挑战赛”和军队“跨越险阻”无人系统挑战赛,多次获得冠军。
1月10日在青岛举行的2019国家智能产业峰会智能驾驶平行论坛上,孙振平研究员结合国内外机器学习相关技术在智能驾驶领域的研究现状和课题组近年来的一些研究成果,向与会人员分享了题为《机器学习在无人驾驶中的应用现状及面临挑战》的精彩报告。
孙振平研究员在报告中表达了一下观点:
机器学习对解决无人驾驶问题很重要,但不是全部;
深度神经网络是场景建模与理解的有力工具;
统计学习、增强学习对于解决行为决策问题会有所帮助,前提是人工建立合适的决策模型;
用机器学习方法解决动力学控制问题似乎并不简单;
能够实现任务、本体状态、环境信息并行输入的网络结构是研究的重点;
现有计算能力仍不足以支持深度神经网络在无人车中的大规模应用
以下是孙振平研究员在2019国家智能产业峰会的报告,智车科技在不改变原意的基础上进行了修改:
大家好,非常荣幸能在这儿跟大家一块聊无人驾驶,因为机器学习在无人驾驶应用方面比较热,针对这个事情跟大家分享一点思考。
大家可能不知道,国防科大在无人驾驶方面应该说做的历史也比较长了,这些年有一些成绩也有很多不足,特别是最近几年我们看到整个社会对无人驾驶特别追捧,我们参与其中,肯定是非常非常的高兴,但是在热的过程中,我们也得认真地去思考,是不是无人驾驶到现在已经比较好的被解决了,这个我们还是要冷静地去思考的。我个人就针对这方面的一些情况跟大家一块儿分享一下。主要就是目前国内外的发展情况,以及我们自己在这方面做的一些工作。
丨无人车的控制结构
说到无人驾驶,从概念上来,大家对这个事情应该都非常清楚了,无非就是给车装上各种各样的传感器,让它能够自己理解周围的环境,自己做规划,自己选择运动的路径,直到控制自己的运动。在这个过程中,希望人不参与或者说尽可能少的参与,这么多的传感器到底怎么组成无人驾驶的系统?这个事如果拿人来类比的话,比较容易理解。一个驾驶员开车感知周围的环境,往往是通过我们的眼睛、耳朵等一些感觉器官。在感知的基础上当然要做决策规划,主要是大脑来完成的,决策规划的结果就是怎么样控制车,操作机构来实现对车辆的控制。
对于我们的无人驾驶系统来说,很显然从原理上也是一样的,我们必须去构建它的眼睛。这个主要两大类,一类是环境感知的传感器,二是运动感知的传感器。其中大脑是什么?对于无人驾驶来说,当然就是运行在计算机上人工智能的程序,这个程序它综合了传感器信息和用户的任务输入,最后产生控制命令,控制命令就控制相应的一些执行机构来控制整个车的运动,这个我想从原理上来说就是这样的。
无人驾驶的技术真正困难就是人工智能的程序。我们怎么去设计它,说到设计,实际上在人工智能应用在移动信息研究中,有一些基本的方案,大家不妨一起简单地回顾一下。
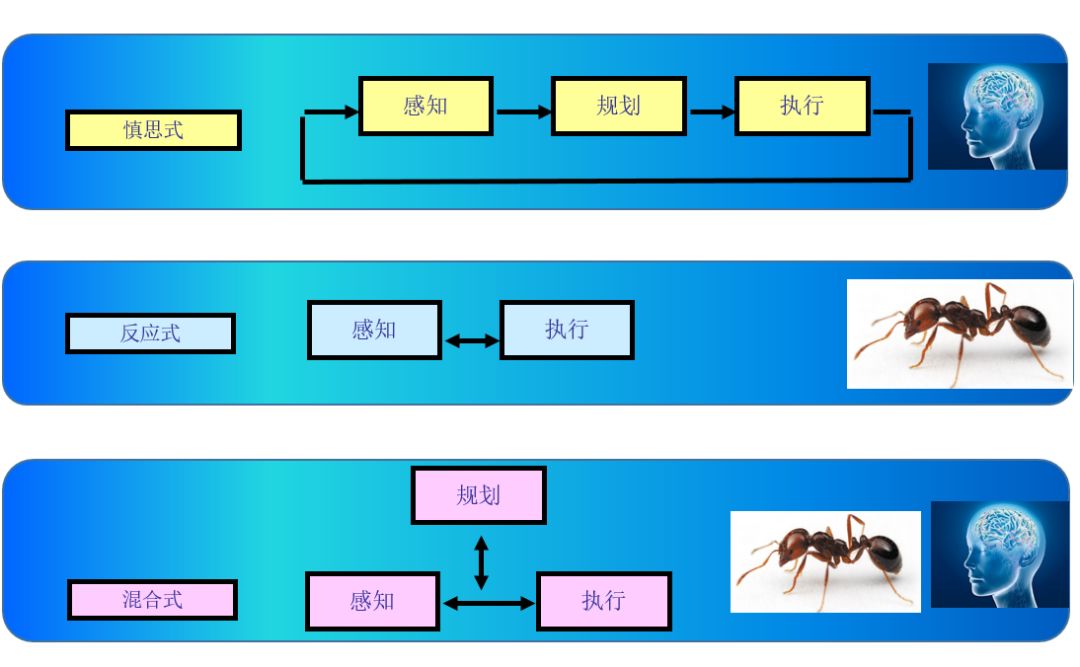
在人工智能研究中,有几种基本的控制结构,一是慎思形式的,什么意思?我们要去显示做决策规划和执行控制这样的环节,对应的是一个一个程序模块。当然要设计一个这样的结构,或者设计这样的软件系统,需要很多人参与,需要人的智力的投入,这个很显然我们觉得做起来非常麻烦。
另外一个比较直接的想法,当然就是所谓的反应式,我们最好能够设计一个简单的程序,不需要知道它内部是怎么工作的,能够直接从传感器到执行器的映射,这就是所谓的反应式。
当然实际在研究过程中,最后大家都发现不管是慎思式还是反应式做来做去都不能够很好的解决问题,怎么办?人类最大的本事就是把各式各样的方法混在一起就是混合式,反应式大家很容易理解,如果有一个控制方向我们用一个状态方程组就能够很好地描述它,当我设计一个简单的控制器就能够实现对这样对象的控制。对于我们说的机器人和无人车也不例外,我们能够很好地描述清楚,就可以设计出一个简单的控制器出来。最早在1948年的时候,当时控制论刚刚产生,就有人设计了一个移动的机器人系统。这个慎思式,实际上大家关注的最典型的可能是世界上第一个自主的机器人,就采用这种慎思式的研究。SHakey研究了一个机器人只要能够不碰撞运动就可以了,这是1968年做出来的,这个也是我们现在智能机器人(无人车)研究真正的现代意义上的开端。
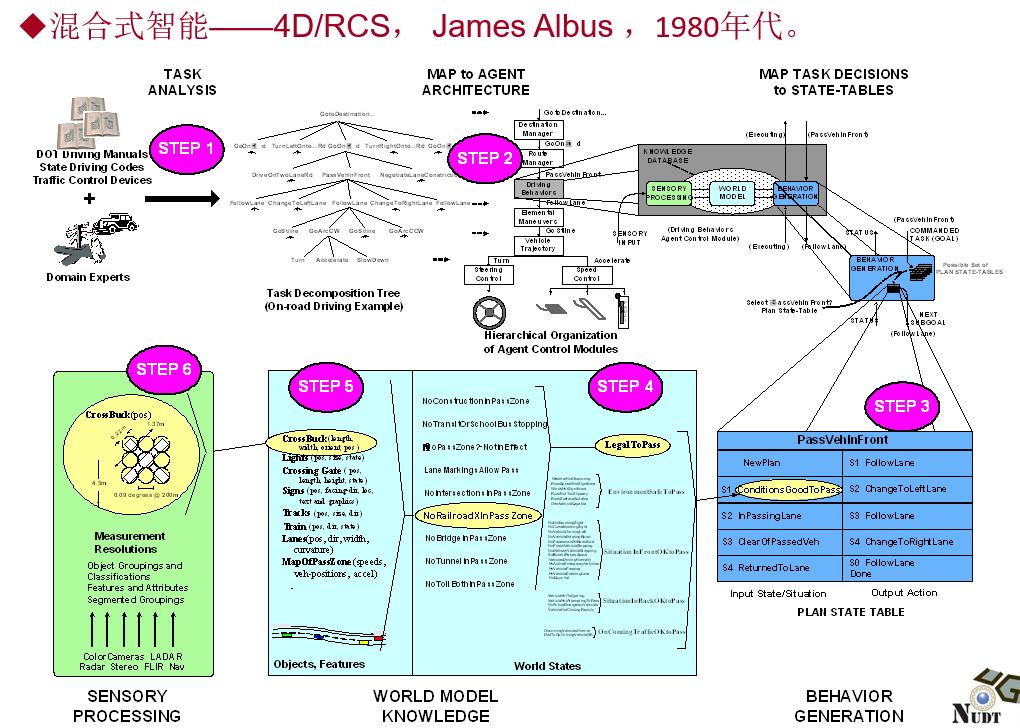
在这些研究基础上,到了1986年的时候,MIT提出了一种所谓的包容式结构,这个包容式结构,大家仔细去分析一下就会发现,它实际上是一种混合式的结构。如果只是把行为定义为行走的话当然很简单,我们就可以设计反应式控制来实现。随着反应式变得越来越复杂,就很难用反应式结构去实现了。这个事情我个人在看了这么多文献之后,大概同样是在1980年代,美国的James他提出了所谓4D/RCS结构,已经是非常完备的或者非常好的方法或者是一个体系了,甚至他们也给出了一套工程化的方法,怎么设计一个复杂的机器人系统或者是无人车,我们自己也是基本上参照4D/RCS这样复杂系统的控制结构来设计我们的无人车的。
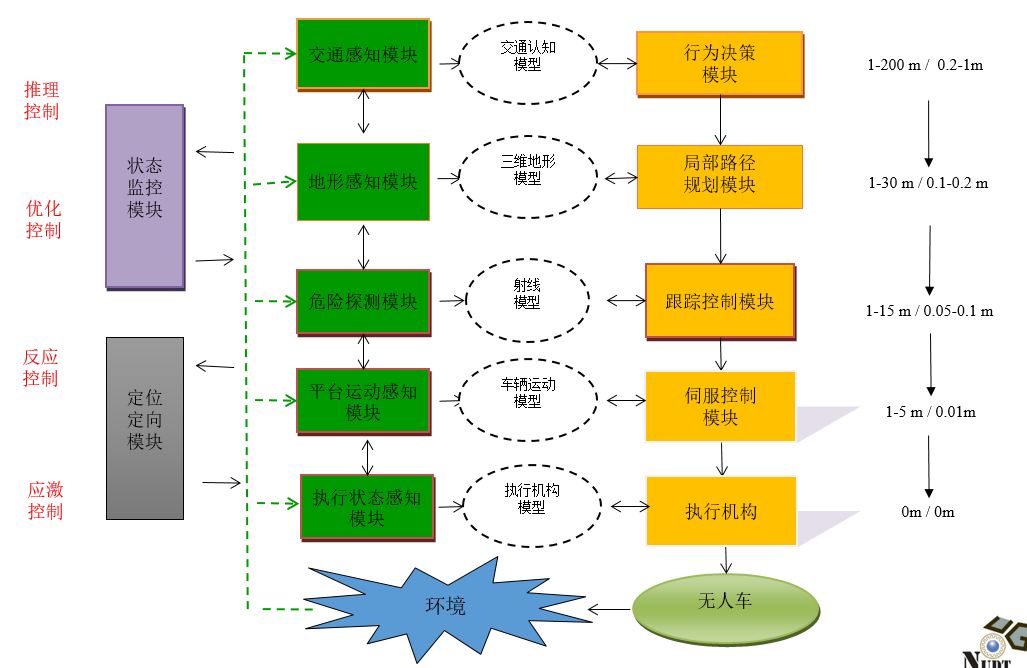
这是我们的无人车采取的一种结构,下面最基本的就是底层的执行结构以及到上面的交通,对交通场景的认知、决策等等。只有知道了结构,我们反过来才能说机器学习在无人车中怎么用,我们刚才说了,对于无人车来说,它的核心就是人工智能程序,机器学习又是人工智能里面的一个重要的内容,大家当然就想着,是不是能够把机器学习用在无人车上,让无人车能够变得越来越聪明,能够越来越好的去适应环境,我们就一起来看一看机器学习在无人车上到底能怎么用。
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

