自动驾驶汽车路径规划算法浅析
自动驾驶汽车的路径规划算法最早源于机器人的路径规划研究,但是就工况而言却比机器人的路径规划复杂得多,自动驾驶车辆需要考虑车速、道路的附着情况、车辆最小转弯半径、外界天气环境等因素。本文将为大家介绍四种常用的路径规划算法,分别是搜索算法、随机采样、曲线插值和人工势场法


自动驾驶汽车的路径规划算法最早源于机器人的路径规划研究,但是就工况而言却比机器人的路径规划复杂得多,自动驾驶车辆需要考虑车速、道路的附着情况、车辆最小转弯半径、外界天气环境等因素。
本文将为大家介绍四种常用的路径规划算法,分别是搜索算法、随机采样、曲线插值和人工势场法。
1.搜索算法
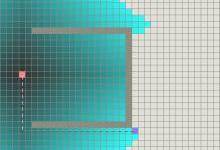
搜索算法主要包括遍历式和启发式两种,其中Dijkstra算法属于传统的遍历式,A*算法属于启发式,在A*算法的基础上,还衍生出了D*Lite算法、Weighted A*算法等其他类型。Dijkstra算法最早由荷兰计算机学家狄克斯特拉于1959年提出,算法核心是计算从一个起始点到终点的最短路径,其算法特点是以起始点开始向周围层层扩展,直到扩展到终点为止,再从中找到最短路径,算法搜索方式如图(1-1)所示。A*算法在Dijkstra算法上结合了最佳优先算法,在空间的每个节点定义了一个启发函数(估价函数),启发函数为当前节点到目标节点的估计值,从而减少搜索节点的数量从而提高效率。A*算法中的启发函数包括两部分,表示从初始点到任意节点n的代价,表示节点n到目标点的启发式评估代价,在对象从初始点开始向目标点移动时,不断计算的值,从而选择代价最小的节点。一般来说遍历式算法可以取得全局最优解,但是计算量大,实时性不好;启发式算法结合了遍历式算法以及最佳优先算法的优点,具有计算小、收敛快的特点。图(1-2)是最佳优先算法示意图,可以看出该算法有一定的选择性,但是面对图中的u型障碍物会出现计算效率低的情况。而A*算法完美的结合了Dijkstra算法和最佳优先算法,不仅有一定的选择性,并且计算量相对也是最少的,更快得找到了最短路径。
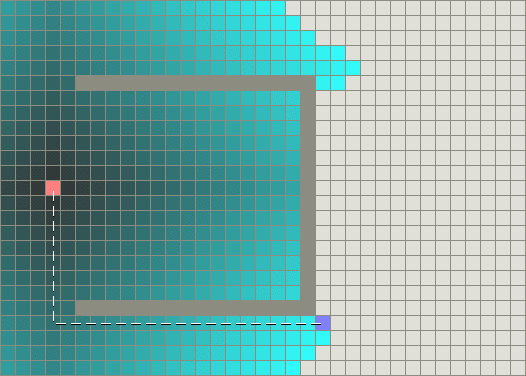
图1-1 Dijkstra算法示意图
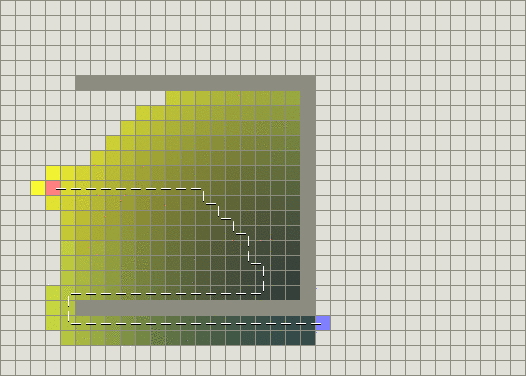
图1-2 最佳优先算法示意图
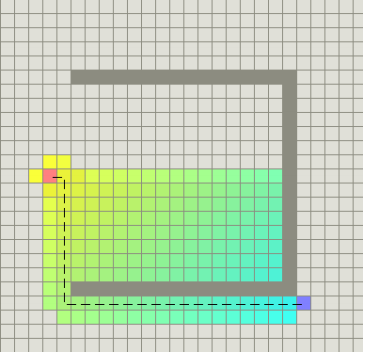
图1-3 A*算法示意图
2.随机采样
随机采样主要包括蚁群算法以及RRT(快速扩展随机树)算法。蚁群算法是由Dorigo M等人于1991年首先提出,并首先使用在解决TSP(旅行商问题)上。其算法基本原理如下:1.蚂蚁在路径上释放信息素。2.碰到还没走过的路口,随机选一条走,同时释放与路径长度有关的信息素。3.信息素浓度与路径长度成反比。后来蚂蚁再次碰到该路口时,就选择信息浓度较高的路径。4.最优路径上的信息素浓度越来越大。5.信息素浓度最大的路径为最优路径。其在小规模TSP中性能尚可,再大规模TSP问题中性能下降,容易停滞。实际道路环境是比较复杂的,不光有道路、障碍物等的限制,也有其自身动力学的约束,所以该算法更适合做全局路径规划,不太适合局部路径规划。
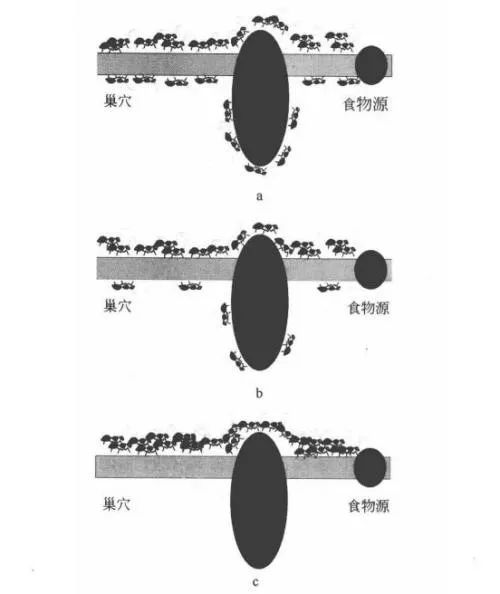
图2-1 蚁群算法示意图
3.曲线插值
曲线插值的方法是按照车辆在某些特定条件(安全、快速、高效)下,进行路线的曲线拟合,常见的有贝塞尔曲线、多项式曲线、B样条曲线等。一般就多项式算法而言,主要考虑以下几个几何约束,从而确定曲线的参数。几何约束:1.起始点的位置与姿态。2.最小转弯半径。3.障碍物约束。4.目标点的位置与姿态。根据考虑的几何约束不同,多项式算法的阶数从三阶到六阶甚至更高阶,阶数越高的算法复杂度越高,收敛速度越慢。四次多项式的形式如式(3-1)所示,参数由几何约束条件确定。基于参数化曲线来描述轨迹,这种类型的算法比较直观,也可以更加准确的描述车辆所需满足的道路条件,规划出的轨迹也十分平坦、曲率变化连续并可进行约束。缺点是计算量较大,实时性不太好,并且其评价函数也比较难以找到最优的,未来的研究方向主要集中于简化算法以及更加完善的评价函数。目前,曲线拟合算法是采用比较广泛的规划方法。

(3-1)
4.人工势场法
人工势场法(Artificial PotentialField,APF)是由Khatib于1986年提出的。该算法是假设目标点会对自动驾驶车辆产生引力,障碍物对自动驾驶车辆产生斥力,从而使自动驾驶车辆沿“势峰”间的“势谷”前进。这种算法的优点就是结构简单,有利于底层控制的实时性,可大大减少计算量和计算时间,并且生成相对光滑的路径,利于保持自动驾驶车辆的稳定性。算法的缺点是有可能陷入局部最优解,难以对规划出的路径进行车辆动力学约束,复杂环境下的势场搭建也比较棘手。势场的基本步骤如下:首先搭建势场,包括障碍物势场以及目标点势场,然后通过求势场负梯度,可以得到车辆在势场中所受的障碍物斥力以及目标点引力。将所受的所有障碍物斥力与目标点引力叠加,就可以得到车辆在势场中任意位置的受力情况,最后根据合力情况不断迭代更新位置,就可以得到从起始点到终点的完整路径。
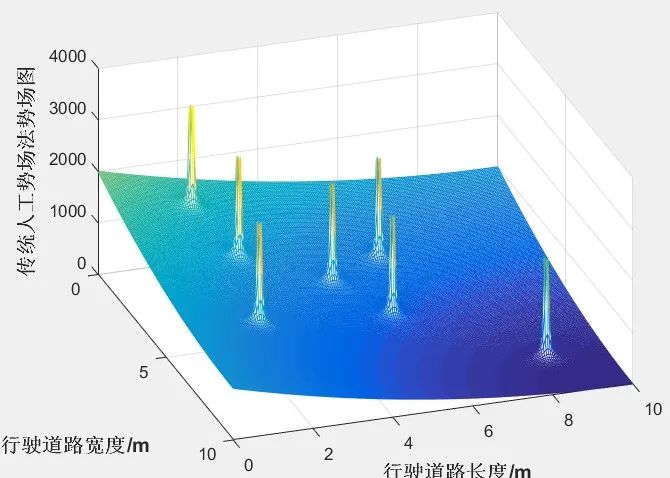
图4-1 基于人工势场法搭建的势能场
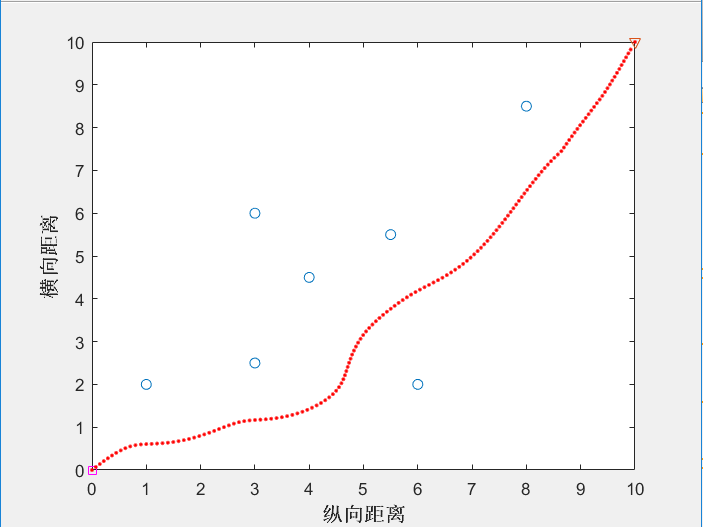
图4-2 基于人工势场法规划的路径点
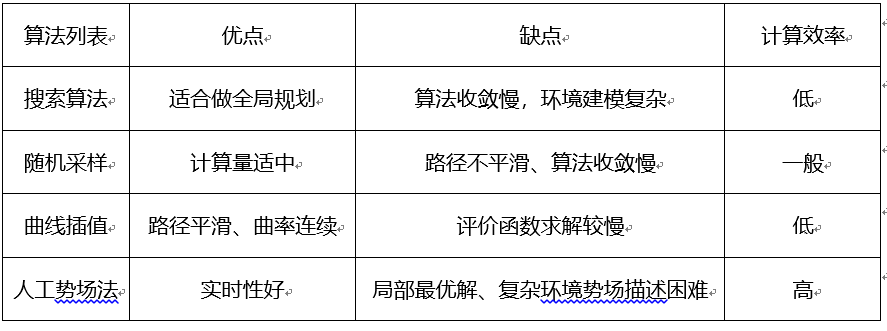
最后以下表对本文介绍的四种算法的优缺点、计算效率进行一个简要的对比总结。不难发现,其中人工势场法的计算速度最快,实时性也最好,但是存在局部最优解、复杂势场难以搭建的情况,这也是未来该算法的研究热点、难点;其中,曲线插值是目前较常见的一种算法,虽然该算法的计算效率不高,但是相信在未来车载计算机的计算能力大幅度提升之后,该算法可以被更广泛得使用。
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

