伯克利新研究:不需要仿真测试,会自我学习的导航系统
加州大学伯克利分校的研究人员创建了伯克利自动驾驶地面机器人(BADGR)。BADGR是使用自我监督数据训练的端到端自主机器人。与大多数传统的依靠几何数据来规划无碰撞路径的传统机器人不同,BADGR依靠“经验”来导航,不需任何仿真模拟或人工监督
加州大学伯克利分校的研究人员创建了伯克利自动驾驶地面机器人(BADGR)。BADGR是使用自我监督数据训练的端到端自主机器人。与大多数传统的依靠几何数据来规划无碰撞路径的传统机器人不同,BADGR依靠“经验”来导航,不需任何仿真模拟或人工监督。

自动驾驶汽车被认为是“移动机器人”的一种,移动机器人导航通常被认为是几何问题,机器人的目标是感知环境的几何形状以便进行规划达到目标的无碰撞路径。
然而,世界的几何视图可能不足以让车辆完成导航。例如,小型的机器人根据几何形状可能走不出高草丛生的草地,因为草地被识别为不可穿越的物体,因此将无法导航到目的地,小车可能的状态为转圈。

加州大学伯克利分校的研究人员创建了伯克利自动驾驶地面机器人(BADGR)。BADGR是使用自我监督数据训练的端到端自主机器人。与大多数传统的依靠几何数据来规划无碰撞路径的传统机器人不同,BADGR依靠“经验”来导航,不需任何仿真模拟或人工监督。
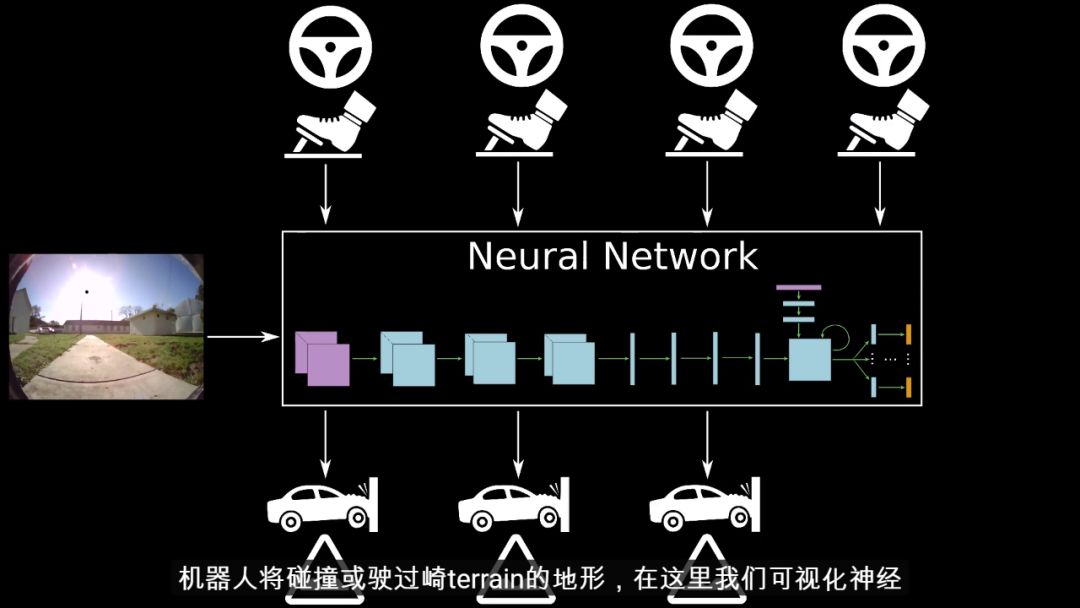
BADGR的核心是 Nvidia Jetson TX2,它来处理车载摄像头,六自由度惯性测量单位传感器,2D LIDAR传感器和GPS系统。具体来说,BADGR 拥有一个由实时相机传感器的观测结果和一系列未来计划的行动提供的人工神经网络,神经网络会预测到达目标的最佳可能路径。
BADGR学习如何通过以下方式导航:1.自主收集数据;2.使用自我监督自主标记数据;3.训练基于图像的神经网络预测模型。
此方法具有一个主要优势,传统技术可以避开路径中的高草,而BADGR可以在其中导航。此外,这使BADGR在收集更多数据时得以改善。研究人员指出:
BADGR背后的关键见解是,通过直接从现实世界中的经验中自主学习,BADGR可以了解导航能力,随着收集更多数据而不断改进,并推广到看不见的环境。

通过进一步实验表明,这种方法比SLAM或者通过仿真的方法,导航效果更突出。但机器人将如何在看不见的甚至是敌对的环境中安全地收集数据?BADGR将如何适应有生命障碍(例如步行的人)的动态环境?还有待进一步解决。
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

