福特开放了迄今为止最全面的数据集
福特自动驾驶数据集公布,这可能是迄今为止最全面的数据集之一。最近十年来,自动驾驶开源数据集变得越来越多,无论是企业或者其他组织,都选择与世界上的其他开发者共享数据,促进技术的进步。但其实这些不同的数据集之间类型并不完全一样
福特自动驾驶数据集公布,这可能是迄今为止最全面的数据集之一。
最近十年来,自动驾驶开源数据集变得越来越多,无论是企业或者其他组织,都选择与世界上的其他开发者共享数据,促进技术的进步。但其实这些不同的数据集之间类型并不完全一样。
不同开源数据集对比
拿最常见的KITTI数据集,它主要提供了传感器数据包括视觉测距,3D对象检测和跟踪领域等。除原始数据外,数据集还包括地面真实性和基准指标,可根据最新技术评估新算法。而牛津大学开源的RobotCar自动驾驶汽车数据集,则是另一种传感器和季节变化丰富的数据集,它的重点是实现长期定位,数据集包含17个月的时间内收集的来自3D摄像头,单目摄像头,激光雷达,GPS / IMU的数据,其中包括所有天气情况和施工情况等。以上这两种数据集不提供任何地图信息。
而nuScenese开源的数据集包含语义图,这些语义图提供了有关道路,行人和人行横道的信息,可用作目标检测,跟踪和定位的先验信息。Argoverse,以及车辆轨迹和3D对象边界框,当然还包含可行驶区域的地图和车道中心线的矢量地图等。 除此之外,还有ApolloScape,CityScapes和Mappilary,它们是其他专注于使用图像和激光雷达组合进行语义分割的数据集。到目前为止提到的数据集的局限性之一是它们大多仅从一辆自动驾驶汽车中收集。
而福特最近在官网上线的自动驾驶数据集,可能不一定是时长跨度最大的,也不一定是场景最丰富,但可能是数据最全的数据集之一。
福特多车采集的季节性数据集

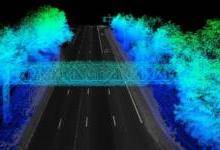
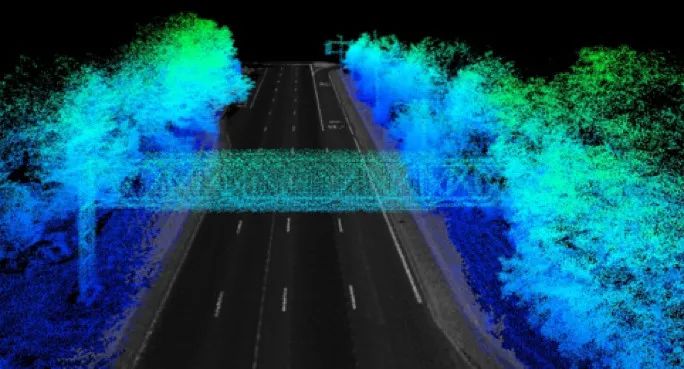
该数据集包含了2017~2018两年间的自动驾驶车队在密歇根州路测数据,总体积1.6TB。来自福特的数据集中有底特律地区一年四季,包括机场、高速公路、市中心、大学校园和郊区等多种驾驶场景。数据主要由4个激光雷达传感器、6个1300万像素相机,一个500万像素相机和惯性测量单元收集。这些传感器收集了3D地面反射率地图、3D点云地图、六自由度真实姿态和局部姿态等信息。所有数据均以Rosbag格式提供,可以使用开源机器人操作系统(ROS)进行可视化,修改和应用。

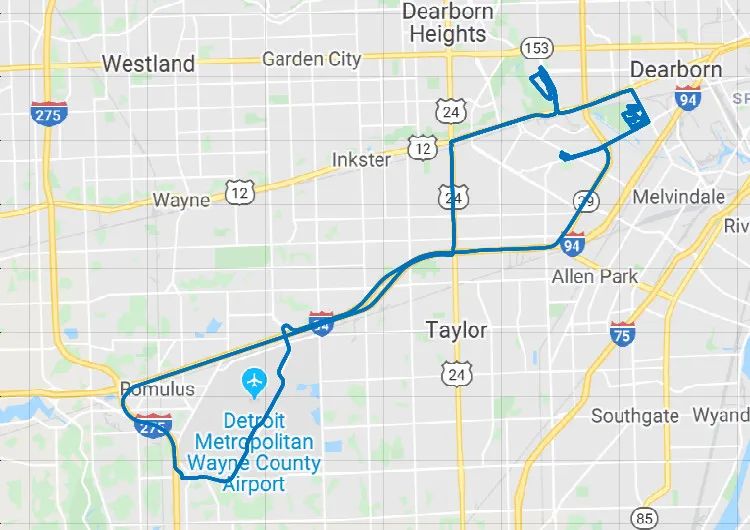
福特汽车穿过大底特律地区的平均路线为66公里。如图所示,每辆车的行驶路线上都包括DTW机场,密歇根大学迪尔伯恩分校和居住社区。每次运行的路线都有细微的变化,以捕捉城市环境中的各种特征,从而提供更有用的数据。
采集数据的硬件平台是以14年福特Fusion Hybrid车队为基础平台构建的。所有传感器都策略性地放置在车辆如下图所示。每辆车都配备了4个Velodyne HDL-32E激光雷达(Velodyne 2011),7个Grey 1.3 MP相机,前方一个5 MP行车记录仪,结合了差分GPS和IMU的Applanix POS-LV定位产品。汽车后备箱用于安装四个具有16 GB Ram的四核i7处理器,联网设备和冷却机制。
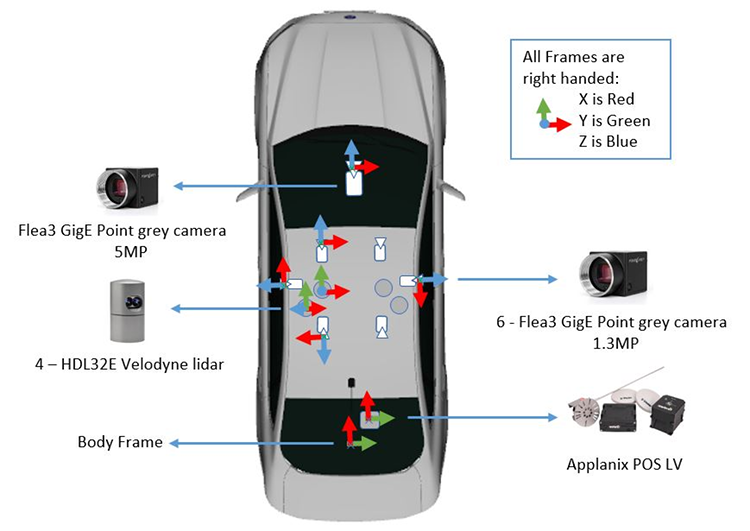
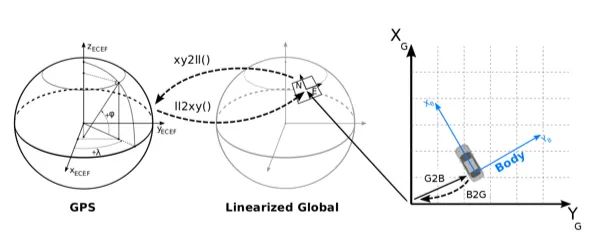
据福特官网介绍,每个传感器都经过了严格的校准。在该数据集中使用的坐标框架包括传感器框架,主体框架,局部框架,GPS框架和全局框架。
总结下来,福特开源的数据集的优点在于多车辆主体、都重季节环境以及城市环境而且包含3D地图的数据集,并且它可以在ROS集成。
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

