目标检测中的非最大值抑制算法
计算机视觉是人工智能的一个重要领域,它可以识别和理解图像和场景。它包括图像识别、目标检测、图像分割、图像生成、图像超分辨率等多个子领域。由于大量的实际用例,目标检测可能应用地最广。目标检测目标检测是指计算机系统定位图像中的目标并识别每个目标的能力



计算机视觉是人工智能的一个重要领域,它可以识别和理解图像和场景。
它包括图像识别、目标检测、图像分割、图像生成、图像超分辨率等多个子领域。由于大量的实际用例,目标检测可能应用地最广。
目标检测
目标检测是指计算机系统定位图像中的目标并识别每个目标的能力。目标检测已广泛应用于人脸检测、车辆检测、行人计数、安全系统和自动驾驶汽车。
目标检测模型从端到端学习范式的发展中受益匪浅:建议、特征和分类器成为一个神经网络,使一般目标检测的结果提高了两倍[1]通常,所有现代目标检测模型都遵循三个步骤:
1. 建议窗口的搜索空间(通过滑动窗口或使用建议的稀疏窗口)。
2. 使用分类器/回归器对窗口评分。
3. 组合可能属于同一对象的窗口。
最后一步称为“非最大抑制”
边界框
在目标检测中,我们通常使用边界框来描述目标在图像中的空间位置。
边界框是一个矩形,使用左上角和右下角坐标绘制。另一种常用的边界框表示法包含矩形的中心以及矩形的高度和宽度。
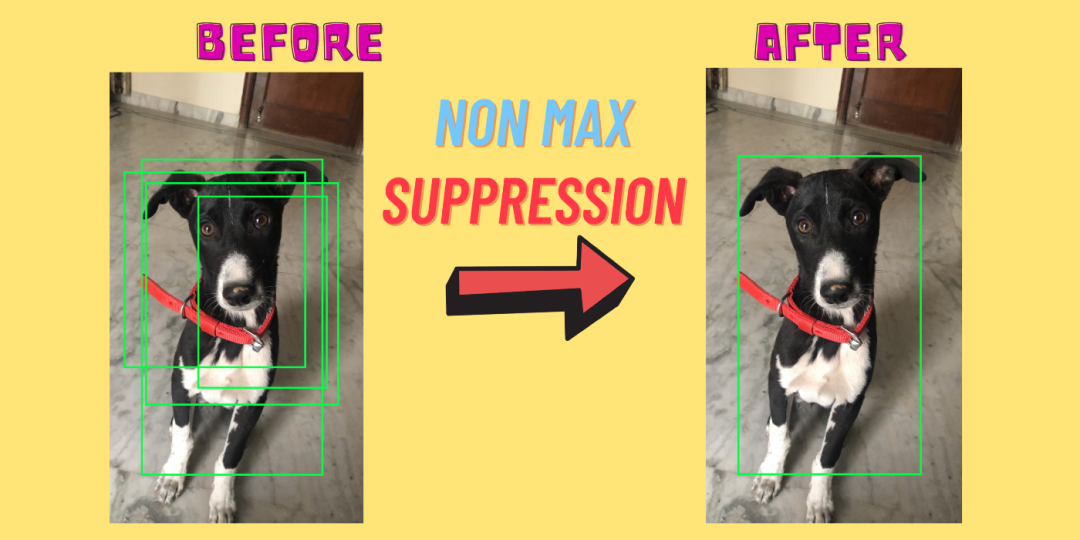
非最大值算法(NMS)
可以使用以下步骤解释该算法:
输入:边界框列表以及类名称和检测到的每个对象的输出概率。
1. 删除输出概率得分小于指定阈值的边界框。
2. 按输出概率的降序排列剩余边界框的列表。
3. 遍历已排序的边界框列表,直到至少剩下一个元素。
4. 从列表中删除第一个边界框,并将其标记为“当前元素”。此外,检查交并比(IOU)。如果IOU高于指定的阈值,则从列表中删除该元素,并将当前元素附加到“最终列表”中
5. 重复步骤3和4。
6. 返回“最终列表”
NMS算法试运行
假设下面的图像(图1)包含两条狗(左一条:Maya,右一条:Zoro),我们有一个对象检测模型,可以区分图像中的Maya和Zoro。

在使用上图对我们的目标检测模型(无NMS)进行推断时,我们将得到如图2所示的输出。在这里,我们可以看到,我们在单个对象上得到了多个具有各自概率分数的边界框。
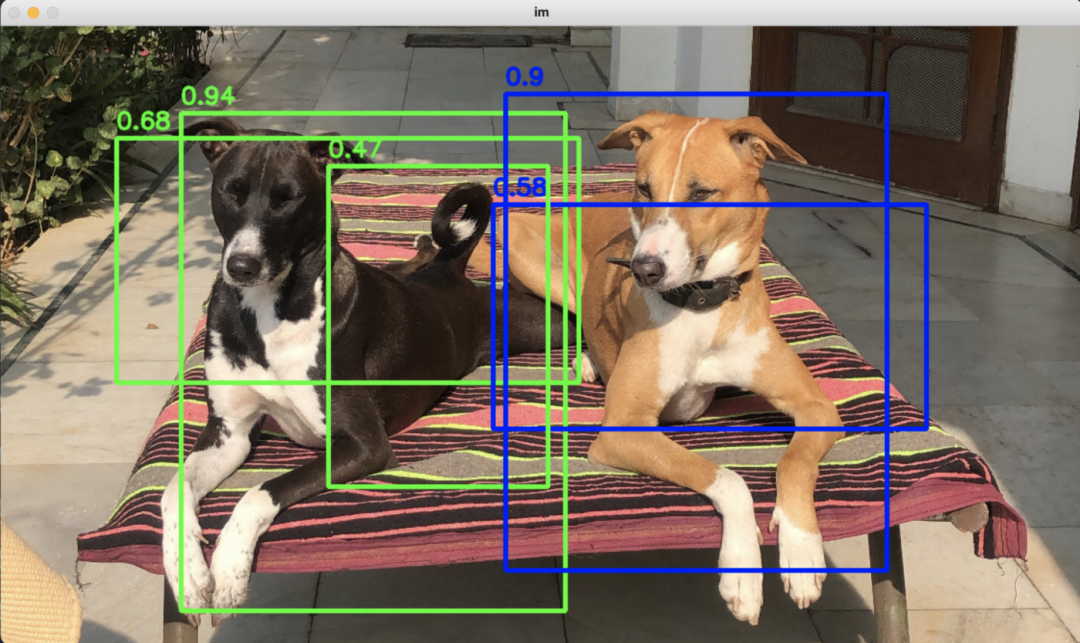
我们的目标是为对象选择最合适的边界框。换句话说,我们必须从概率为0.94、0.68和0.47的三个框中选择一个Maya边界框。同样,我们也必须从概率为0.9和0.58的两个边界框中找到Zoro的最佳边界框。
根据算法,我们将首先丢弃所有概率分数低于指定阈值的边界框。例如,如果我们将阈值设置为0.5,我们将丢弃Maya概率为0.47的边界框。
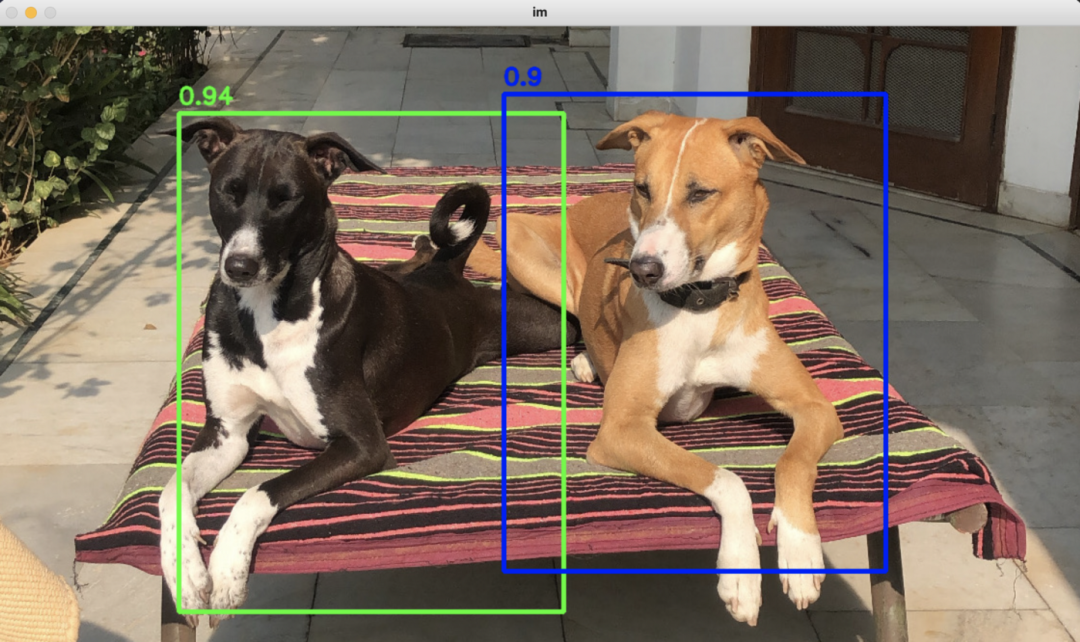
此外,我们将找到概率得分最高的边界框,并将其IOU与同类的所有其他边界框进行检查。如果IOU高于阈值(表示相同的对象),则丢弃概率分数较低的边界框。
同样,我们将对图像中所有检测到的对象执行以下步骤。最终输出如图3所示。
代码
首先,我们将初始化概率置信阈值和IOU阈值。例如,如果一个边界框的概率低于概率置信阈值,那么我们将丢弃该边界框。同样,如果IOU分数高于定义的阈值,我们不会考虑输出概率低的边界框。
import cv2
class NMS:
def __init__(self) -> None:
self.conf = 0.5
self.iou_threshsold = 0.4
下面截取的代码中的IOU函数计算两个区域的IOU。IOU是两个区域的相交面积与两个区域的并集的比率。在IOU函数中,bboxes1和bboxes2是一个包含以下四个元素的列表:
[ X(top-left), Y(top-left), X(bottom-right), Y(bottom-right) ]
def IOU(self, bboxes1, bboxes2):
bboxes1 = [int(i) for i in bboxes1]
bboxes2= [int(i) for i in bboxes2]
xA = max(bboxes1[0], bboxes2[0])
yA = max(bboxes1[1], bboxes2[1])
xB = min(bboxes1[2], bboxes2[2])
yB = min(bboxes1[3], bboxes2[3])
intersection_area = max(0, xB - xA + 1) * max(0, yB - yA + 1)
box1_area = (bboxes1[2] - bboxes1[0] + 1) * (bboxes1[3] - bboxes1[1] + 1)
box2_area = (bboxes2[2] - bboxes2[0] + 1) * (bboxes2[3] - bboxes2[1] + 1)
iou = intersection_area / float(box1_area + box2_area - intersection_area)
return iou
下面的代码在图像上绘制边界框,并将概率分数放在框的顶部。参数“images”是图像对象,“bboxes_list”包含检测到的对象的坐标、类和概率输出。
bboxes_list = [class, X(top-left), Y(top-left), X(bottom-right), Y(bottom-right), output_probability]
Sample values:
0 187 90 586 607 0.94
0 120 116 600 370 0.68
1 511 185 961 418 0.58
0 340 145 568 478 0.47
1 524 70 920 565 0.92
def draw_overlay(self, image, bboxes_list):
overlay_color = {
'0' : (0, 255, 0),
'1' : (255, 0, 0)
}
overlay_thickness = 3
font = cv2.FONT_HERSHEY_SIMPLEX
for coord in bboxes_list:
class_name = coord[0]
start_point = (int(coord[1]), int(coord[2]))
end_point = (int(coord[3]), int(coord[4]))
prob = float(coord[5])
text_start_point = (int(coord[1]), int(coord[2]) - 10)
image = cv2.rectangle(image, start_point, end_point,
overlay_color[class_name], overlay_thickness)
image = cv2.putText(image, str(prob), text_start_point,
font, 0.8, overlay_color[class_name], overlay_thickness - 1, cv2.LINE_AA)
cv2.imshow("im", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
以下函数是上述NMS算法的实现。此函数用于在应用非最大值抑制算法后返回所需的边界框。
def nms(self, image, bboxes_list):
req_bboxes, final_boxes = [], []
for coord in bboxes_list:
prob = float(coord[5])
if prob > self.conf:
req_bboxes.append(coord)
# sorting the bounding boxes based on probability score
bboxes_sorted = sorted(req_bboxes, reverse=True, key=lambda x: x[5])
while len(bboxes_sorted) > 0:
# removing the best probability bounding box
box = bboxes_sorted.pop(0)
for b in bboxes_sorted:
# comparing with the same class
if box[0] == b[0]:
iou = self.IOU(box[1:-1], b[1:-1])
if iou >= self.iou_threshsold:
# if IOU is large then discard the box with lowest probability
bboxes_sorted.remove(b)
print(len(bboxes_sorted))
final_boxes.append(box)
return final_boxes
以下是NMS类的驱动程序代码。我们首先读取coordinates.txt获取边界框的坐标和其他详细信息;然后,我们应用NMS算法来获得所需的边界框。
if __name__ == "__main__":
image = cv2.imread("zoraya.jpg")
with open("coordinates.txt", 'r') as f:
data = f.readlines()
data = [i[:-1].split(' ') for i in data]
obj = NMS()
obj.draw_overlay(image, data)
final_boxes = obj.nms(image, data)
obj.draw_overlay(image, final_boxes)
coordinates.txt
0 187 90 586 607 0.94
0 120 116 600 370 0.68
1 511 185 961 418 0.58
0 340 145 568 478 0.47
1 524 70 920 565 0.92
结论
本文概述了对非最大值抑制算法的需求以及python实现。此外,我们还使用一个图像示例解释了该算法。
原文标题 : 目标检测中的非最大值抑制算法
相关文章












 AIGC热点
热点
AIGC热点
热点
-
19打开,有戏

